

Automatic calibration method between three-dimensional laser and monocular vision
A three-dimensional laser and monocular vision technology, which is applied in the direction of line-of-sight measurement, measuring devices, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] The specific embodiments of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings.
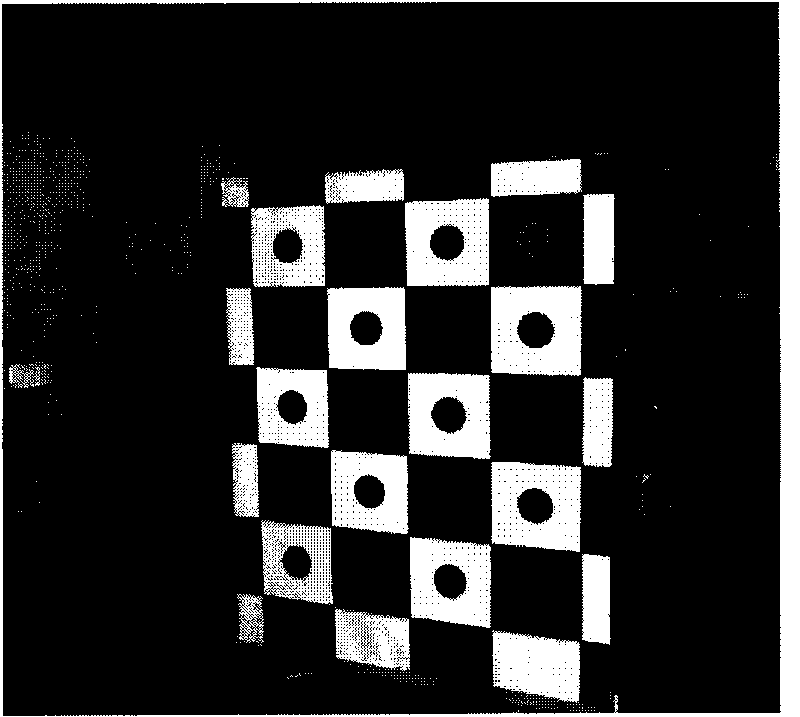
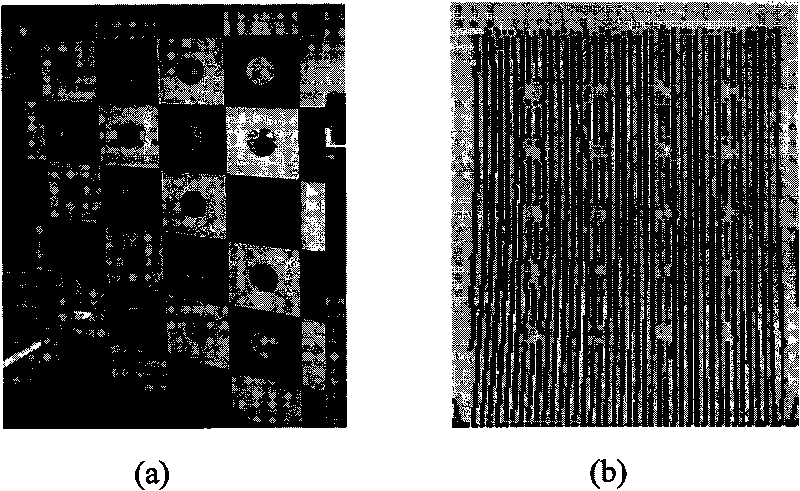
[0060] In order to verify the effectiveness of this method, the use of Figure 10 The constructed device was used for validation of the calibration method. SICK LMS 291 laser sensor is adopted, the plane scanning angle is 0-180 degrees, and the longitudinal range is dynamically adjustable, divided into 8 meters, 16 meters, 32 meters (distance resolution is 1 mm), 80 meters (distance resolution is 1 cm) four scanning ranges, the scanning range of 32 meters is used here. The gimbal motor has optional rotation angle resolutions, including: 0.192°, 0.288°, 0.480° and 0.960°. Here, 0.192° is selected, the starting angle is 30°, and the scanning range is 30°-130°. Use the motor to drive the laser sensor to obtain the three-dimensional laser ranging data of the scene. The size of the calibration device adopts a 4×5 bla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More