

Automatic calibration method between three-dimensional laser and monocular vision
A three-dimensional laser and monocular vision technology, applied in the direction of line-of-sight measurement, measuring devices, instruments, etc., to achieve the effect of ensuring intuitive rendering, easy to carry and apply, and simple and reasonable design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
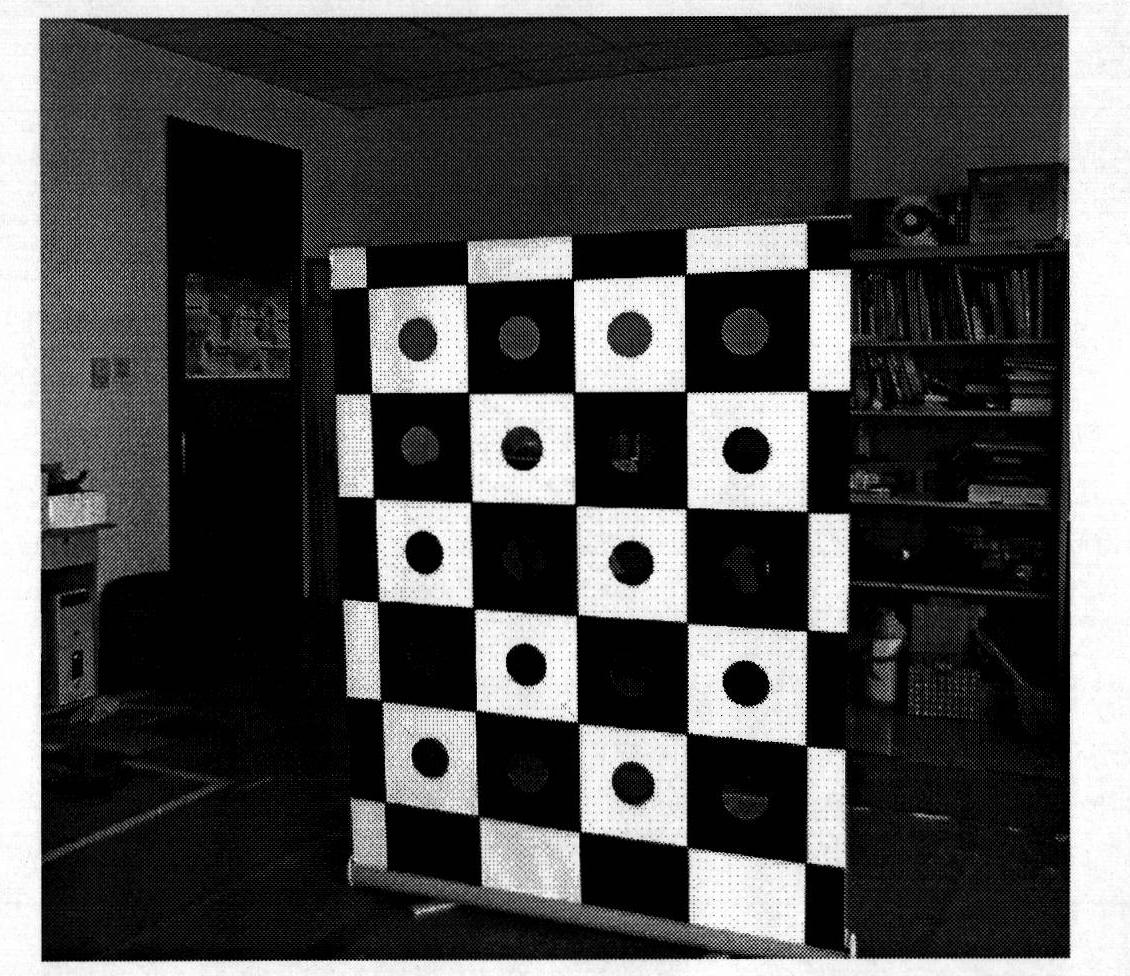
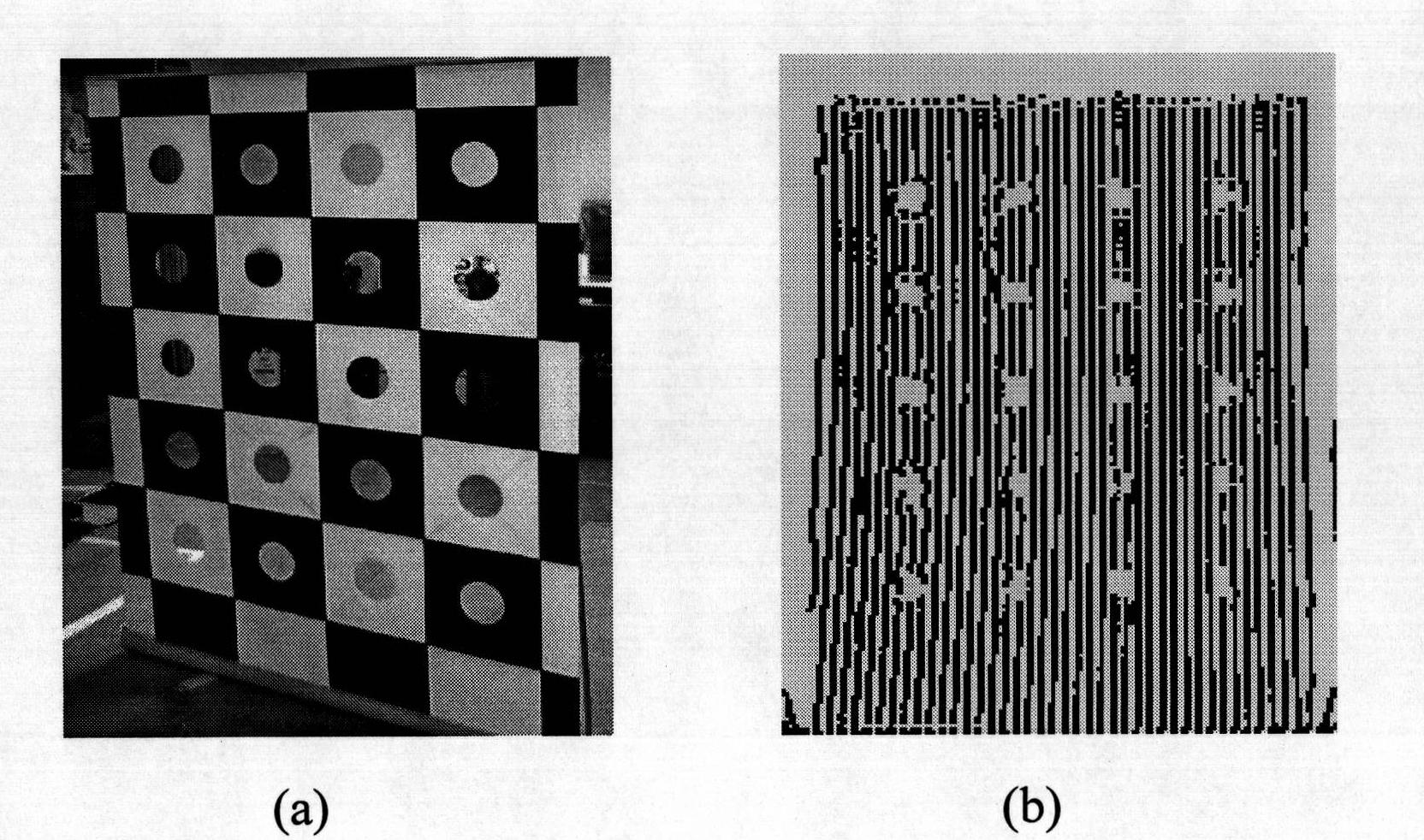
[0021] 1. Analysis of laser sensor characteristics and design of calibration device
[0022] Different media have different reflectivity to the laser beam emitted by the laser sensor, among which the reflectivity of glossy objects is higher than that of matte objects, and the impact of different incident angles on distance measurement is also very significant, but the surface color of the target object has a great influence on the distance measurement. The distance has little effect. According to the above laser characteristics, a three-dimensional laser and vision integrated calibration device (such as figure 1 As shown), the material of the device is glossy photo paper to ensure a high reflectivity to the laser. Print a 4×5 square black and white grid on the surface of the photo paper, and the side length of each black and white grid is 25cm. Carry out a hollow in the center of each black and white grid, and the shape of the hollow is a circle with a radius of 5cm. After ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More