

Articulated structure for a multi-axis robot, and a robot including such a structure
A multi-axis robot and articulated technology, applied in manipulators, mechanical equipment, program-controlled manipulators, etc., can solve the problems of limiting the speed of tool movement, increasing the inertia of the forearm, etc., and achieve the effect of reducing inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
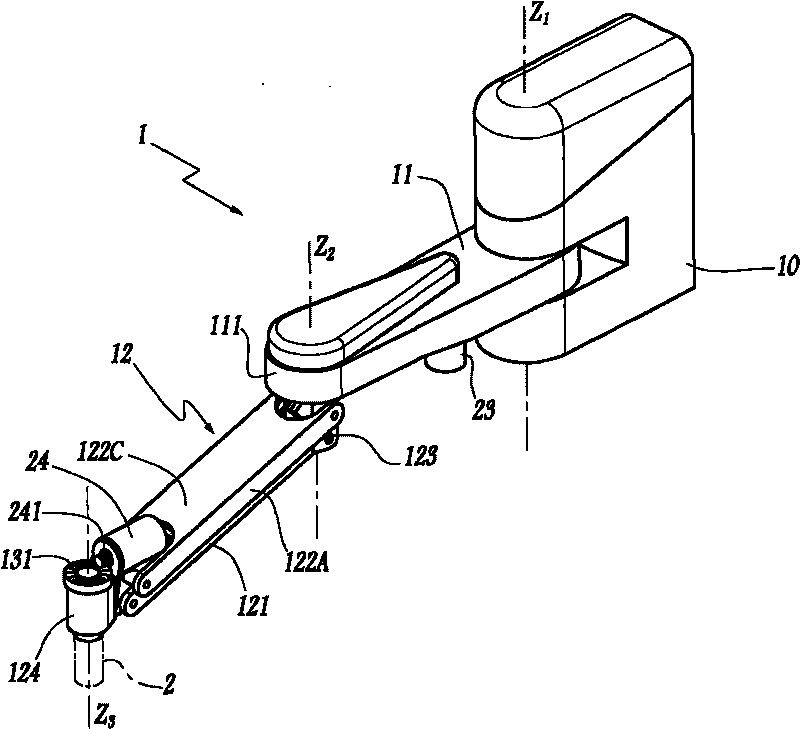
[0034] exist Figure 1 to Figure 3 The structure 1 visible in FIG. 1 forms part of a multi-axis robot which also includes an electronic control unit, a bundle of cables, and / or a bundle of pipes feeding pressurized gas, and other accessories, which are not shown for clarity of the figure. Likewise, these components are not shown in the robots of other embodiments.
[0035] Structure 1 is used to move tool 2 to various positions, the tool is only in figure 1 Schematically indicated in dash-dotted lines in , the tool moves along a path extending not only in the horizontal plane but also perpendicularly with respect to this plane. For example, tool 2 may be a gripper tool.
[0036] The structure 1 comprises a base 10 which is fixed relative to where the structure 1 is mounted. The base is formed for around the vertical axis Z 1 U-shaped piece (clevis) of the articulated arm 11 .
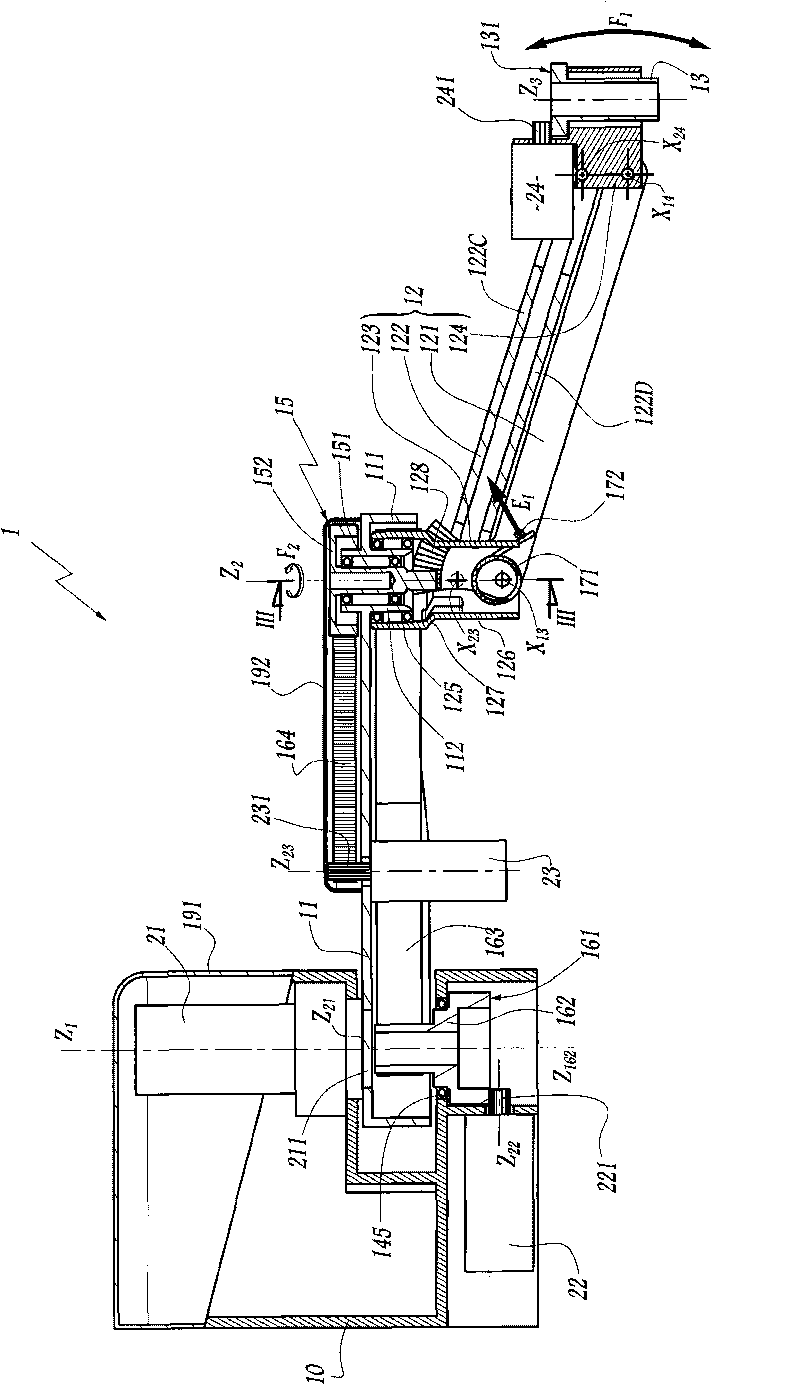
[0037] On the base 10, a first actuator 21 composed of a rotating gear reduction motor (electri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More