

Attitude estimation method of maneuvering acceleration-assisted extended Kalman filter (EKF) attitude and heading reference system (AHRS)
A technology for extending Kalman and heading systems, which is applied in the field of attitude estimation of nine-state extended Kalman filtering heading and attitude systems, and can solve the problems of inability to obtain pitch angle and roll angle estimation, long maneuvering time, and inability to estimate heading angle information.
Inactive Publication Date: 2010-07-21
BEIHANG UNIV
View PDF0 Cites 75 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Existing methods are more effective when the carrier is maneuverable, but when applied to UAVs, helicopters and other carriers, due to the long maneuvering time and the requirement that the attitude can still maintain high accuracy, the influence of the maneuvering acceleration of the carrier itself cannot Eliminate, so that the accurate pitch angle and roll angle estimation cannot be obtained according to the accelerometer information, and the heading angle information cannot be accurately estimated according to the magnetic compass information
Therefore, when the carrier is in a large maneuvering state for a long time (such as a long-term coordinated turn of the aircraft), due to the existence of centripetal acceleration, the accelerometer and the magnetic compass cannot effectively correct the attitude error after a period of time, and the zero bias of the corresponding gyro will also decrease. It is getting bigger and bigger, which is a key obstacle in the application of the open-loop IFOG heading and attitude system in the mobile carrier
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
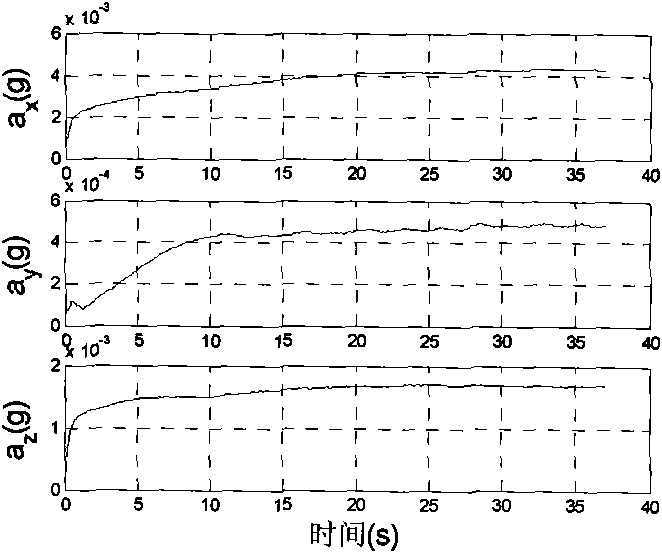
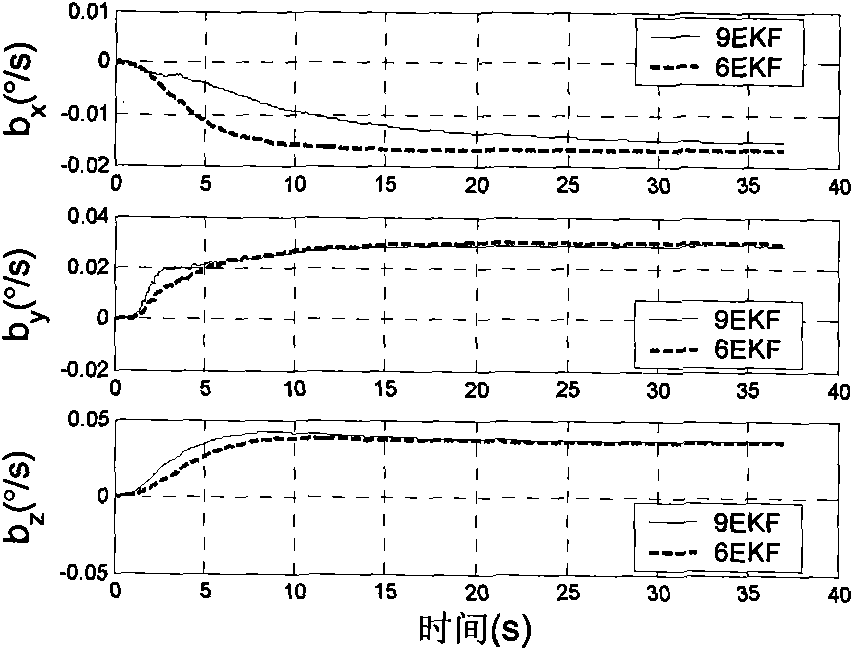
[0127] In this embodiment, with pure strapdown algorithm, six-state extended Kalman filter attitude algorithm (the state quantities are three attitude angle errors, the zero bias error of the three-axis gyroscope, and the acceleration error measurement equation does not consider the carrier maneuvering acceleration, or in other words, the carrier The maneuvering acceleration is set to measure white noise), the nine-state extended Kalman filter attitude algorithm and the high-precision integrated navigation system POS (Position and Orientation System) are tested, and useful conclusions are drawn.
[0128] (1) Uniaxial turntable test
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
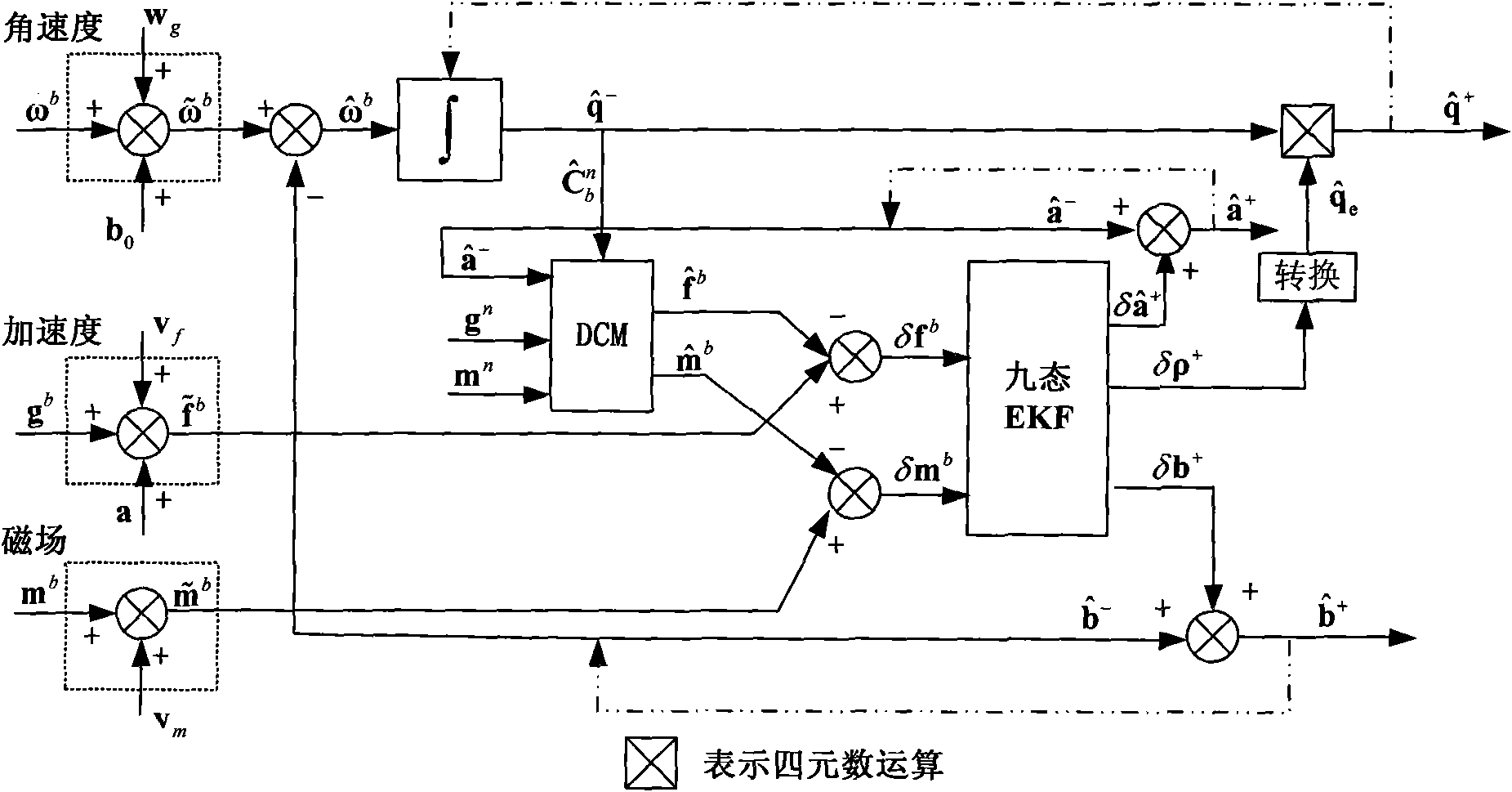
The invention provides an attitude estimation method of a maneuvering acceleration-assisted extended Kalman filter (EKF) attitude and heading reference system (AHRS). The state quantity of the EKF contains an error of three attitude angles, a null bias error of a three-axis gyroscope and a three-axis carrier maneuvering acceleration error of a carrier system, and the observed quantity of the EKF contains a three-axis acceleration error and a three-axis earth magnetic field error. A strapdown attitude algorithm and the nine-state EKF algorithm are subjected to data fusion to acquire attitude estimation of the AHRS. A single-axis turntable experiment, a vehicle-mounted dynamic experiment and a flight experiment prove that the maneuvering acceleration-assisted nine-state EKF data fusion algorithm has stable attitude angle accuracy under different maneuvering conditions, and the mean square deviation of the attitude angle can be limited within 2 degrees.
Description
technical field [0001] The invention relates to a strapdown inertial attitude system attitude estimation technology, in particular to a nine-state extended Kalman filter attitude estimation method utilizing carrier maneuvering acceleration assistance. Background technique [0002] Due to the limited gyro accuracy of the open-loop IFOG heading and attitude system, after initialization, only relying on the traditional strapdown algorithm, the attitude will quickly diverge, and the information of the accelerometer and magnetic compass needs to be used for correction. Existing methods are more effective when the carrier is maneuverable, but when applied to UAVs, helicopters and other carriers, due to the long maneuvering time and the requirement that the attitude can still maintain high accuracy, the influence of the maneuvering acceleration of the carrier itself cannot Eliminate, so that more accurate pitch angle and roll angle estimation cannot be obtained according to the acc...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01C21/16G01C21/20G01C21/18G01C21/08
Inventor任章郭鹏飞
OwnerBEIHANG UNIV