

Multi-joint mechanical arm mechanism
A multi-joint robotic arm and joint technology, applied in the direction of manipulators, claw arms, joints, etc., to achieve the effect of convenient folding and reduced storage space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] The present invention is described in more detail below in conjunction with accompanying drawing example:
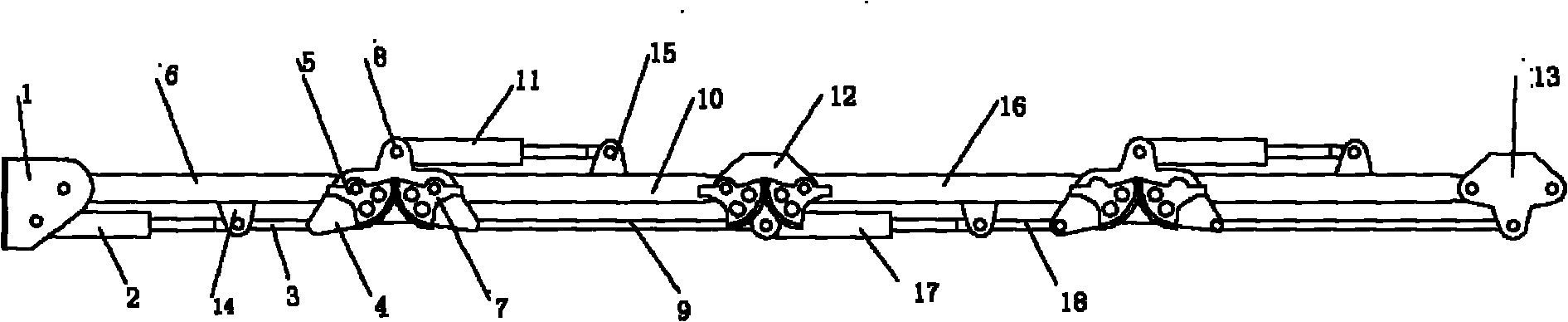
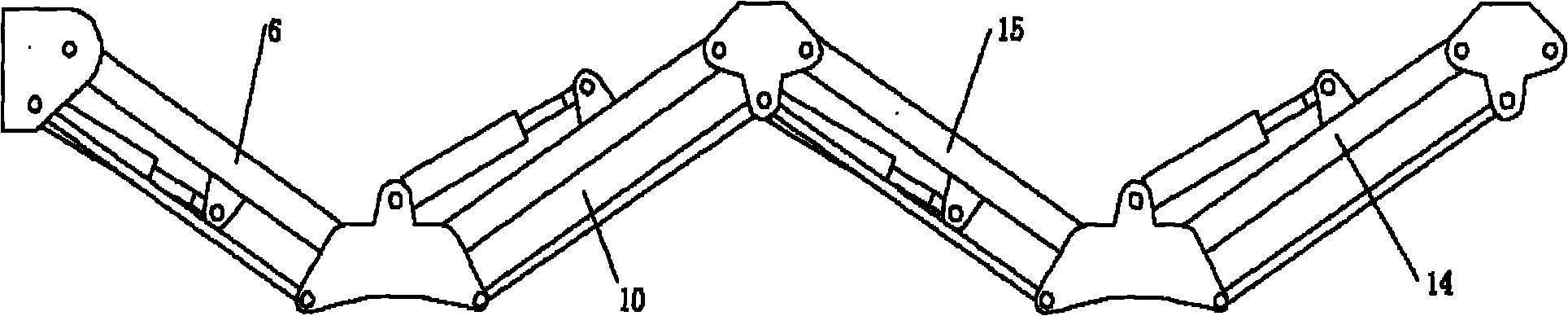
[0016] combine figure 1 with 2 , the present embodiment is a 4-section mechanical arm mechanism. Among them, joint 1 is the starting joint, which is mainly used for the starting end of the multi-joint mechanical arm. On the one hand, it facilitates the fixed connection of the arm with other mechanisms; The movable joint 4 links to each other. The first movable joint 4 is another joint that simultaneously combines Figure 4 , this joint is mainly used for the connection of arm 6 and arm 10. The first movable joint 4 is in the shape of an airplane, and the connecting rod 3 and the connecting rod 9 are connected with the joint 4 through the shaft holes 4a-1, 4a-2 by using pivot pins; the arm 6 and the arm 10 are connected by pivot pins through the shaft holes 4b-1, 4b-2 is connected to joint 4. If the arm 6 and the arm 10 need to be synchronized, then on the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More