

Method for accurately positioning absolute position of deep-sea beacon based on ultra short base line
An ultra-short baseline and absolute position technology, applied in positioning, measurement devices, radio wave measurement systems, etc., can solve problems such as no correction of sound ray bending, no method of selecting the location of the measurement point, and unknown location of the beacon
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described in more detail below in conjunction with accompanying drawing example:
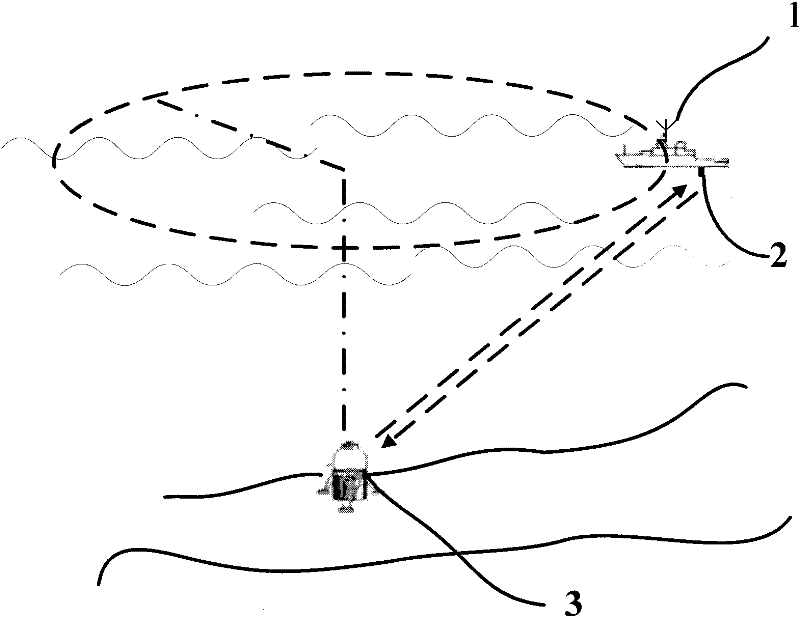
[0025] In the present invention, if figure 1 , Beacon 1 is anchored on the seabed, the position is X b ; The acoustic pulse signal is periodically emitted at time interval T; the ultra-short baseline acoustic array 2 is installed on the surface ship, and the high-precision GPS3 is installed on the ship. Ultra-short baseline acoustic matrix at different measuring point positions X Gi Detect the acoustic signal of the beacon and find its direction, combine the installation error calibration results of the ultra-short baseline and the ship attitude data of the measuring point to obtain the azimuth of the beacon in the geodetic coordinate system where θ i Defined as the angle between the horizontal direction of the beacon sound signal measured at the i-th measuring point and the true north direction; Defined as the grazing angle of the beacon acoustic signal mea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More