Gait rehabilitation robot footrest device with metatarsal joints
A rehabilitation robot and pedal technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problem of ignoring the role of the metatarsal joint of the human foot, and achieve the effect of good rehabilitation training.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention is described in more detail below in conjunction with accompanying drawing example:
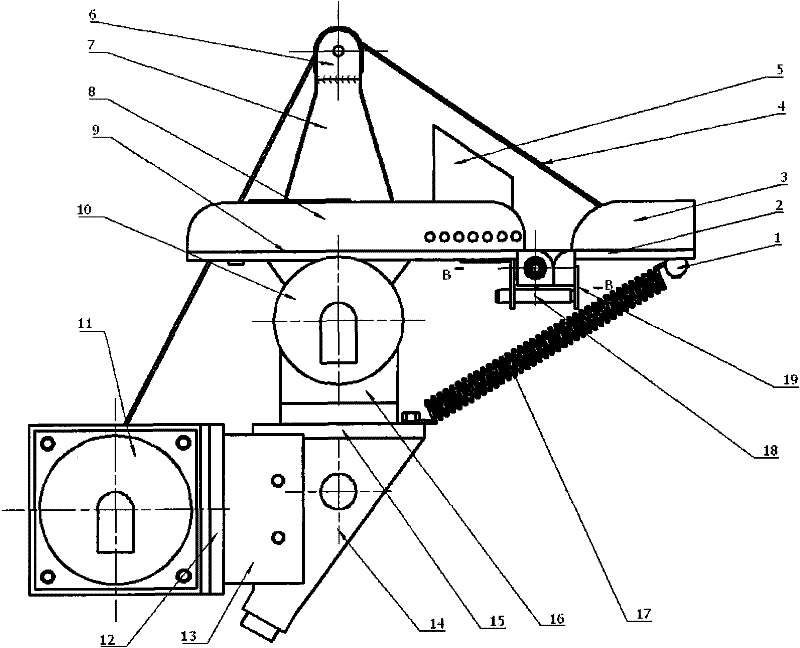
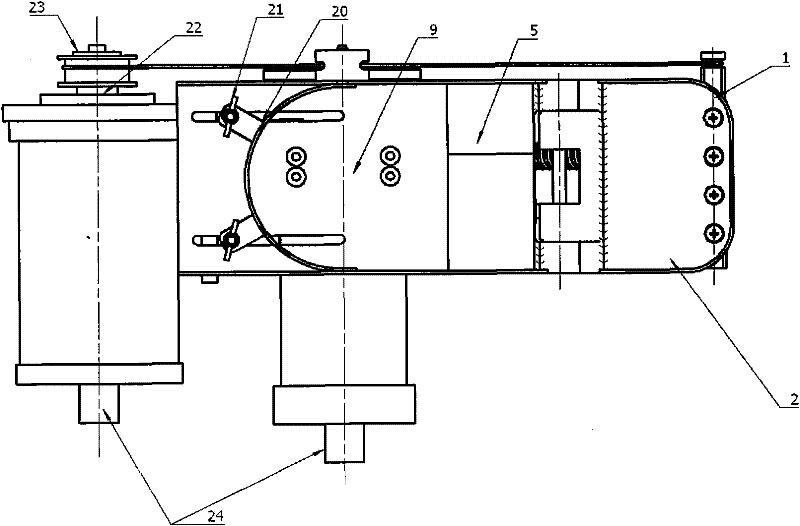
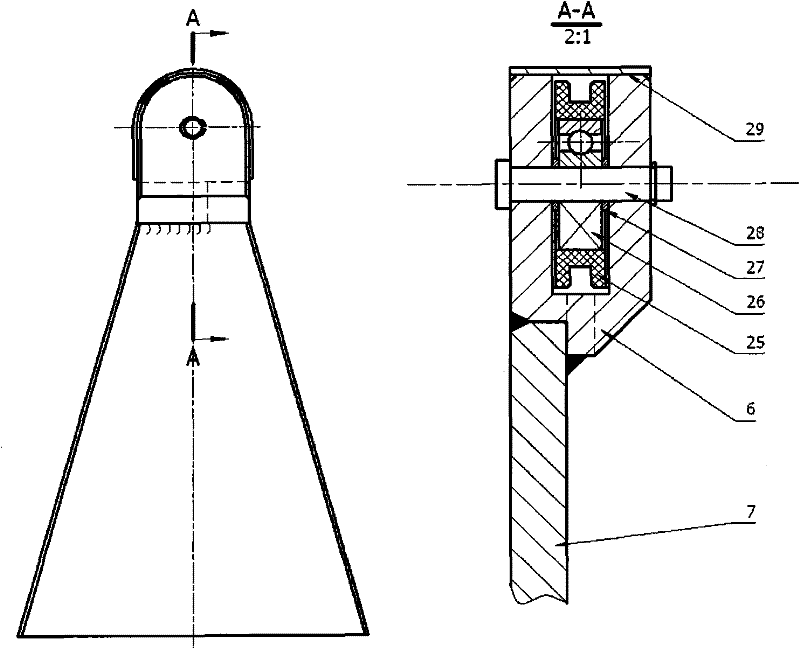
[0016] combine Figure 1-5 , the whole mechanism includes a front foot plate part, a rear foot plate part, a support column, a motor transmission part, and a signal detection part. The front foot plate is welded in two parts, and the bottom of the front foot plate 2 is welded with a detection block 19, which can change its output signal potential when the distance from the proximity switch 18 is less than a certain range. The rope column 1 is fixed on the front end of the front foot plate, and its left end protrudes and has grooves for connecting ropes. A spring 17 is connected between the rope column 1 and the top plate 15, which provides pre-tightening force and power for the front foot board to return to the motion for the rope. The front foot plate periphery is fixed with protective frame 3, sticks out the front foot plate to prevent the patient's pin. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com