

Hybrid driving type exoskeleton device for hand rehabilitation
A hybrid drive and exoskeleton technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of inability to carry out rehabilitation training anytime and anywhere, single driving mode, and affecting the effect of rehabilitation training, so as to improve the effect of rehabilitation training, Good effect of mobility and portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
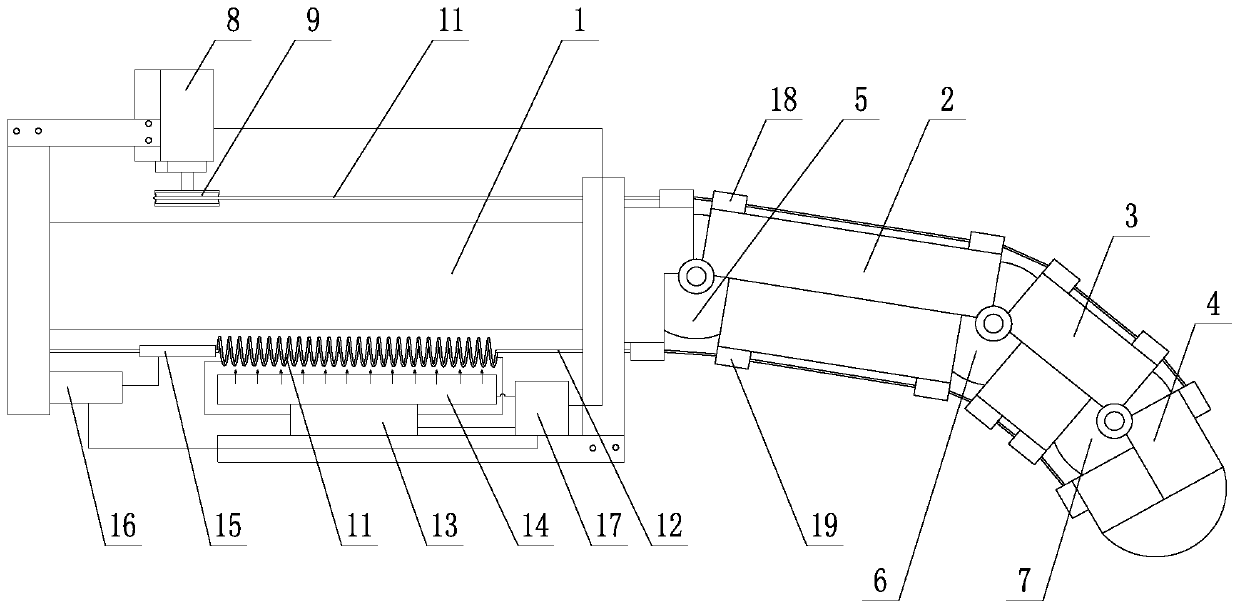
[0014] Such as figure 1 As shown, a hybrid-driven exoskeleton device for hand rehabilitation includes a palm supporting exoskeleton 1, a finger supporting exoskeleton and a finger driving mechanism; the finger supporting exoskeleton includes a root-end knuckle supporting exoskeleton 2. The middle phalanx support exoskeleton 3 and the tip phalanx support exoskeleton 4; the root end phalanx support exoskeleton 2 is hinged with the palm support exoskeleton 1 through the first rotating joint 5, and the root end phalanx supports the exoskeleton 1. The skeleton 2 is hinged with the middle knuckle support exoskeleton 3 through the second rotation joint 6, and the middle knuckle support exoskeleton 3 is hinged with the tip knuckle support exoskeleton 4 through the third rotation joint 7; the finger drive mechanism includes Deceleration motor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More