

Experiment table for testing hydraulic servo system
A technology of hydraulic servo system and test bench, which is applied in the field of test benches, can solve the problems of high cost, high risk, and high risk of experiments, and achieve the effect of reducing experimental risks and costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0030] Embodiment 1: Experimental research on force control of a hydraulic cylinder drive unit is carried out.
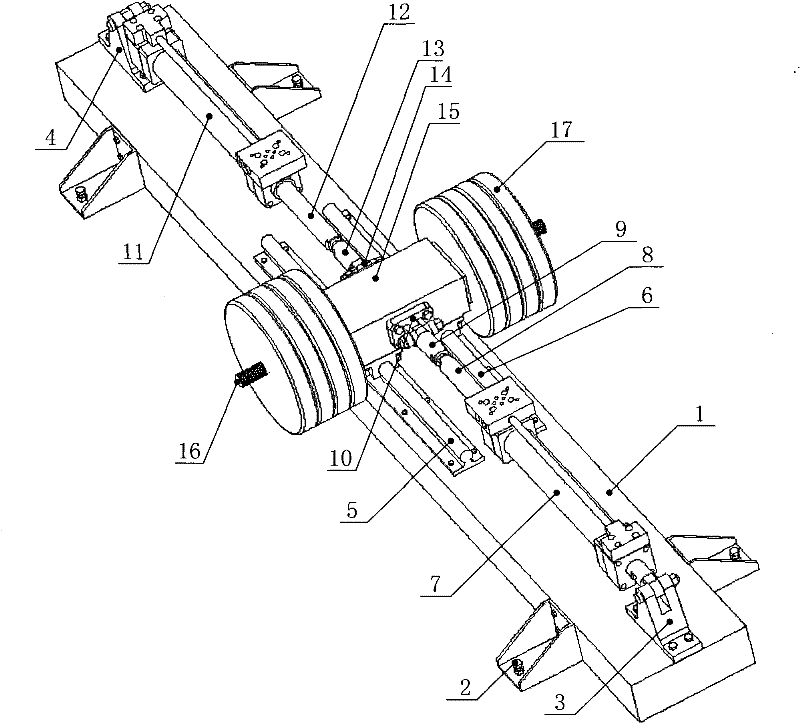
[0031]In this embodiment, the second hydraulic cylinder driving unit can be removed, and the first hydraulic cylinder driving unit drives the slide table 15 to move back and forth along the guide rails 5 and 6, and the control target is the piston rod 8 and the first hydraulic pressure of the first hydraulic cylinder driving unit. The force value of pulling the pressure sensor between the piston rod lugs 9 of the cylinder drive unit. The first hydraulic cylinder drive unit is enabled to generate a desired continuous output force.
Embodiment 2
[0032] Embodiment 2, research on the position servo control of the hydraulic cylinder drive unit under the condition of continuous external load.
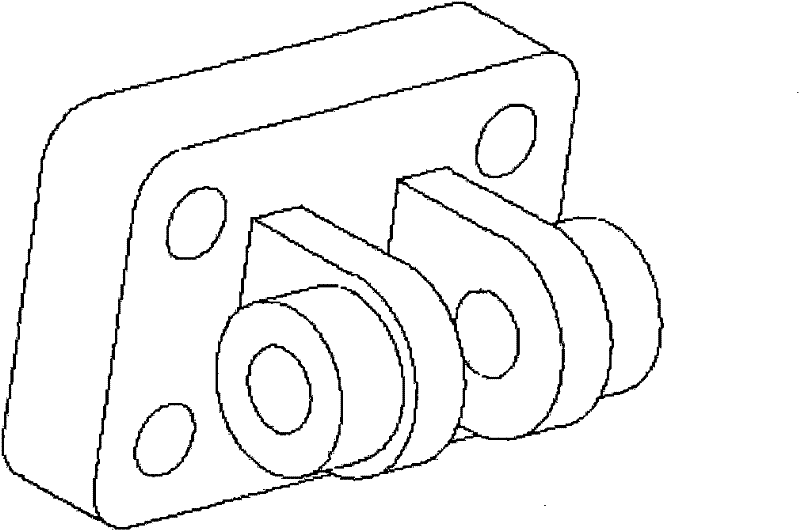
[0033] In this embodiment, the controlled system is a position servo control system composed of the first hydraulic cylinder drive unit, the sliding table 15 and its load 17 . The first hydraulic cylinder driving unit and the second hydraulic cylinder driving unit are installed at the same time, the first hydraulic cylinder driving unit generates continuous external disturbance force, and the first hydraulic cylinder driving unit adopts position control. Under the action of continuous external disturbance force, when different control strategies or algorithms are adopted, the invention can realize the research on the position servo control performance of the controlled system. According to another example of the present invention, the Figure 4 Schematic diagram of the structure of the extended connection block shown. The connect...
Embodiment 3
[0035] Implementation example 3, a position servo control experiment of the hydraulic drive unit is carried out under the condition of discontinuous external force load.
[0036] In this embodiment, the controlled system is a position servo control system composed of the first hydraulic cylinder drive unit, the sliding table 15 and its load 17, etc., and the first hydraulic cylinder drive unit and the second hydraulic cylinder drive unit are installed at the same time. The drive unit of the two hydraulic cylinders adopts force control, and the first lug 13 of the drive unit of the first hydraulic cylinder drives the pin (or bolt) installed on it to slide in the long groove of the extension connecting block 10. The external disturbance force exerted by the position servo control system composed of the drive unit, the slide table 15 and its load 17 is zero. When the pin (bolt) reaches the two ends of the long slot of the extended connection block 10, it starts to exert the desir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More