

Omnidirectional quadruped walking mobile device based on hybrid connected mechanism
A hybrid mechanism, mobile device technology, applied in the direction of motor vehicles, transportation and packaging, can solve problems such as joint sealing difficulties, inability to completely solve problems, etc., to reduce failure rates, improve reliability and environmental adaptability, possibility reduced effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in conjunction with accompanying drawings.
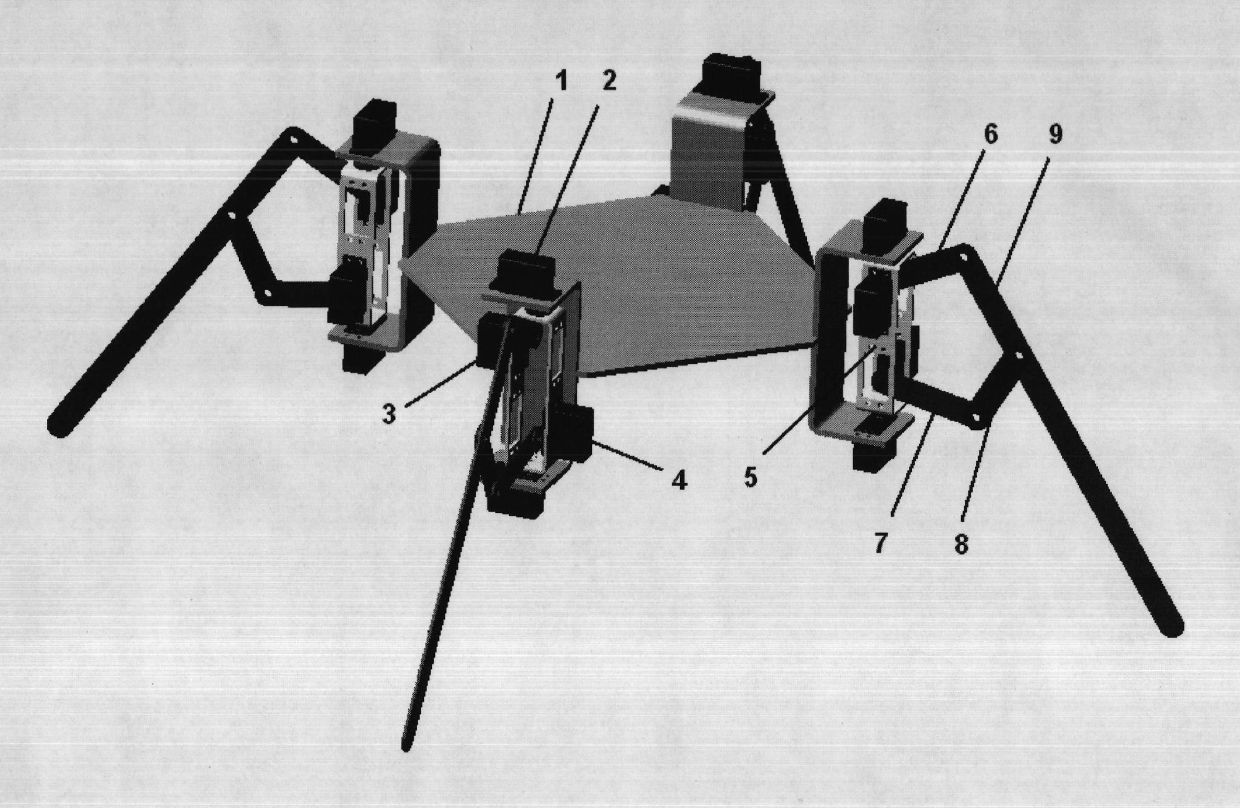
[0017] Omnidirectional quadruped walking mobility devices such as figure 1 As shown, it includes: frame, drive motor and four leg mechanisms with symmetrical structure.
[0018] Such as figure 1 , 2 As shown, the present invention uses a unique structural design to solve the problems that the exposed joint drivers of the conventional quadruped walking device are easily damaged in the application environment and that the quadruped walking device is difficult to achieve omnidirectional walking.
[0019] Technical scheme of the present invention:
[0020] Each leg mechanism consists of 5 links and is equipped with 3 drive motors, see figure 1 The driving motor 2 drives the connecting rod 5 to rotate, and drives the entire leg mechanism plane to rotate; the driving motor 3 and the driving motor 4 jointly drive the end point of the leg mechanism to move in the plane of the leg me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More