Jumping robot of locust-simulated turning joint lever ejecting mechanism
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of movable joints and robots, which is applied in the fields of motor vehicles, transportation and packaging to achieve the effects of reducing costs, improving energy utilization, and reducing the weight of the body
Inactive Publication Date: 2012-04-25
ZHEJIANG UNIV
View PDF6 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Although some positive progress has been made in the research of bionic robots, this direction is still in the research stage internationally
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment
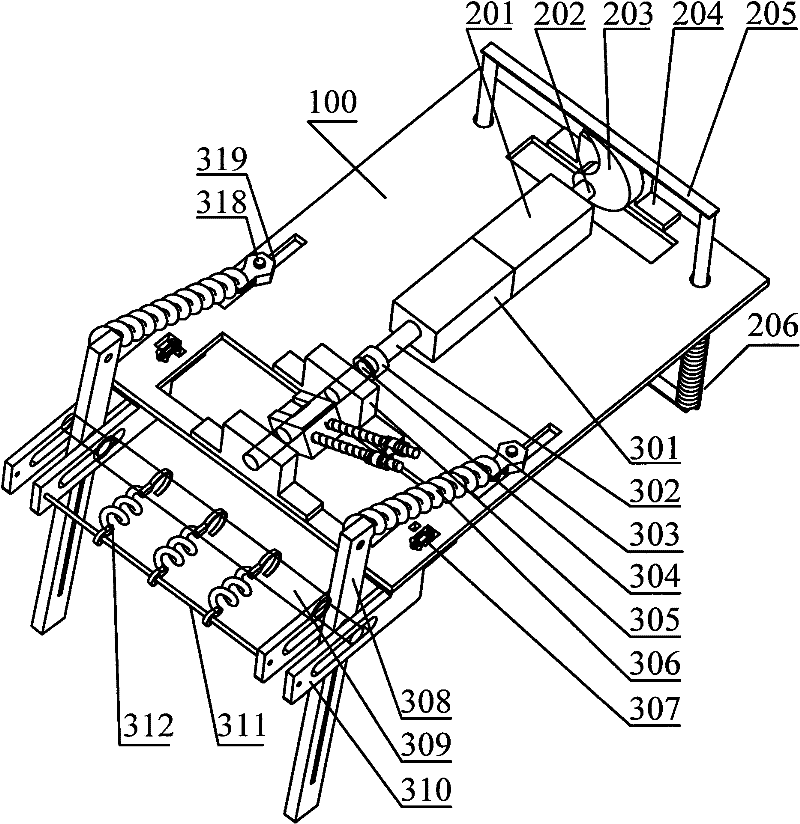
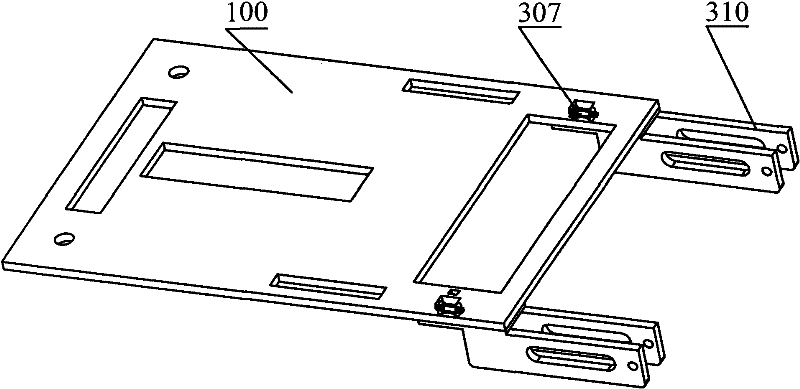
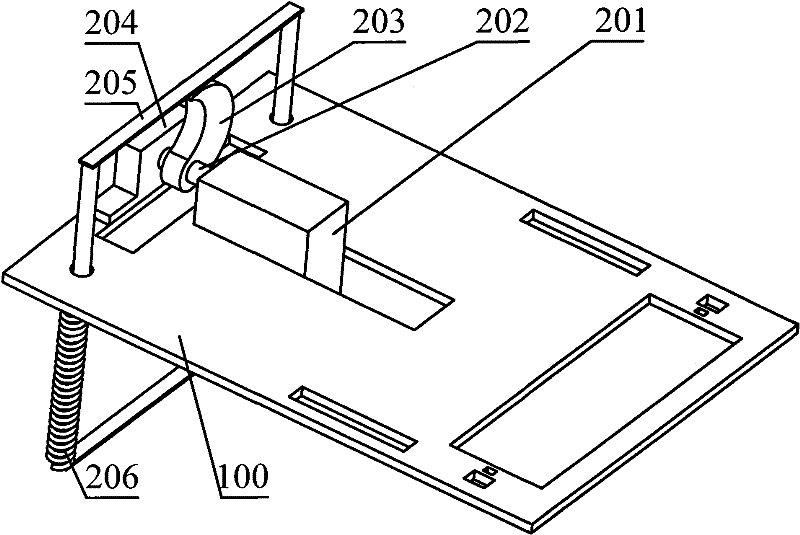
[0033] The present invention is installed with the front leg of drive and support and damping function in the front end of body 100, is installed in the rear end of body 100 with the rear leg of drive and movable joint lever elastic energy storage function. The body 100 is a cuboid structure as a whole, and holes and grooves are opened along the thickness direction on the body 100, such as figure 2 As shown, the front end of the body 100 is opened with a T-shaped through-slot, the middle of the rear end of the body 100 is opened with a rectangular through-slot perpendicular to the vertical side of the front-end T-shaped through-slot of the body 100, and two short sides of the rectangular through-slot are respectively opened. Rectangular slot, a smaller rectangular slot is opened near the short side of the rectangular through slot, and a larger rectangular slot is opened at the end away from the short side of the rectangular through slot. The length direction of the larger rect...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a jumping robot of a locust-simulated turning joint lever ejecting mechanism, comprising a front leg with the functions of driving, supporting and shock absorption and a back leg with the functions of driving and turning joint lever elastic energy storage, wherein the front leg comprises a front leg power mechanism, a front leg motor output shaft, an eccentric cam, a frontleg, a front leg spring and the like; and the back leg comprises a back leg power mechanism, a back leg motor output shaft, a shaft coupling, a back leg transmission shaft, a spring, a roller wheel, a back leg, a back leg sliding rotation shaft, a fork-shaped back leg retainer, a fork-shaped back leg retainer tail rod, a spring set, a fixed pull button, a rotary pull button, a screw pair, a sliding guide sleeve, a connecting spring bolt, a steel wire rope, a connecting steel wire rope bolt and the like. With the structural design of the eccentric cam, the front leg has the function of providing engine body promoting force through the elastic energy storage; by adopting the structural design of a movable rotation shaft and a movable pivot lever, the back leg realizes the functions of slow energy storage and rapid energy release in the ejecting mechanism through the combined design of the fixed pull button and the rotary pull button.
Description
technical field [0001] The invention relates to a robot structure, in particular to a jumping robot structure imitating the ejection mechanism of a locust movable joint lever. technical background [0002] Interstellar exploration is a hotspot of widespread concern in the aerospace fields of various countries. The Lunokhod series lunar rovers of the Soviet Union and the Mars rovers of the Sojoumer, Encourage, and Spirit series of the United States all adopt wheeled structures. The traditional wheeled structure design cannot pass through the rugged slopes on the surface of the planet, and usually can only be circumvented, which seriously affects the effectiveness and efficiency of exploration in an interstellar environment that relies entirely on solar energy for energy; The buildup on the planet's surface, combined with the planet's low-gravity environment causes the wheels to slip, making the robot prone to sagging, and Spirit has a similar problem. The low-gravity enviro...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More