

Automatic tracking proportional-integral-differential (PID) control system and method for gyrotheodolite to perform coarse north finding
A technology of automatic tracking and control system, applied in control/adjustment systems, theodolites, electric controllers, etc., can solve the problems of difficult operation for beginners, labor-intensive operators, damage to gyro theodolites, etc., to achieve the effect of improving the degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0032] In order to solve the above problems, reduce the influence of human factors on the north-seeking measurement of the gyro theodolite, and improve the automation degree of the gyro theodolite north-finding, the embodiment of the present invention provides an automatic tracking PID control system and a control method for the rough north-seeking of the gyro theodolite. See description below:
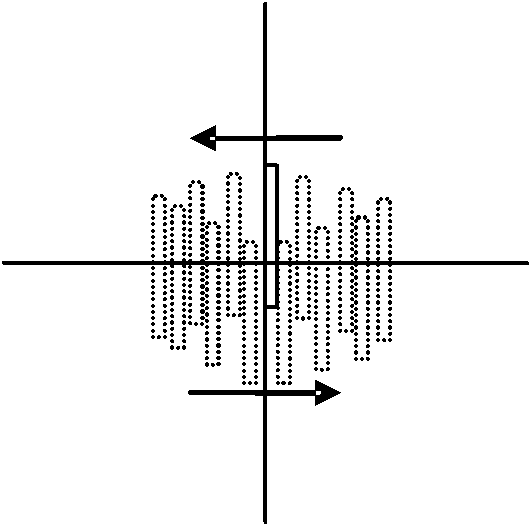
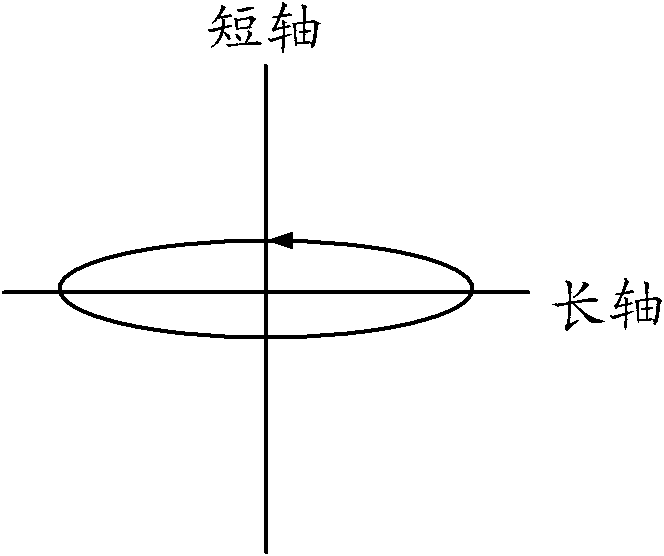
[0033] figure 1 It is the trajectory of the gyro cursor on the focal plane of the CCD (Charge-coupled Device, charge-coupled device), which has two kinds of displacements: left and right and up and down. As long as the cursor is long enough, it can ensure that it sweeps across the CCD light-receiving surface. Will figure 1 unfold, get figu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More