

Robot calibration method based on exponent product model
A calibration method and robot technology, applied in the field of robot calibration, to avoid conversion, introduce small errors, and achieve simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
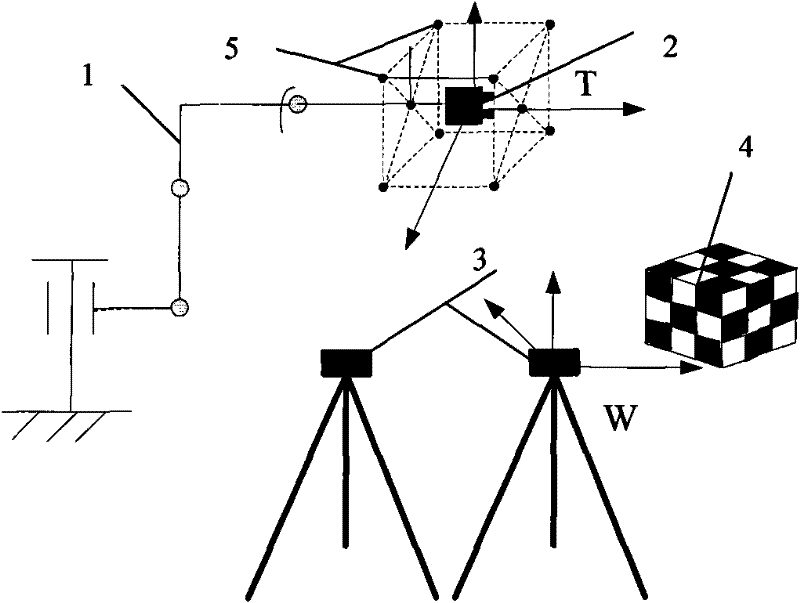
[0024] See figure 1 , A robot calibration method based on the exponential product model, providing industrial robots 1, robot-independent measuring instruments 3, terminal stereo imaging equipment 2 and stereo calibration blocks 4. The terminal stereo imaging equipment is installed at the end of the robot in a detachable connection mode, the measuring instrument is installed on the ground bracket of the calibration site, and the stereo calibration block is located in the part that can be detected by both the calibration field measuring instrument and the terminal stereo imaging equipment.
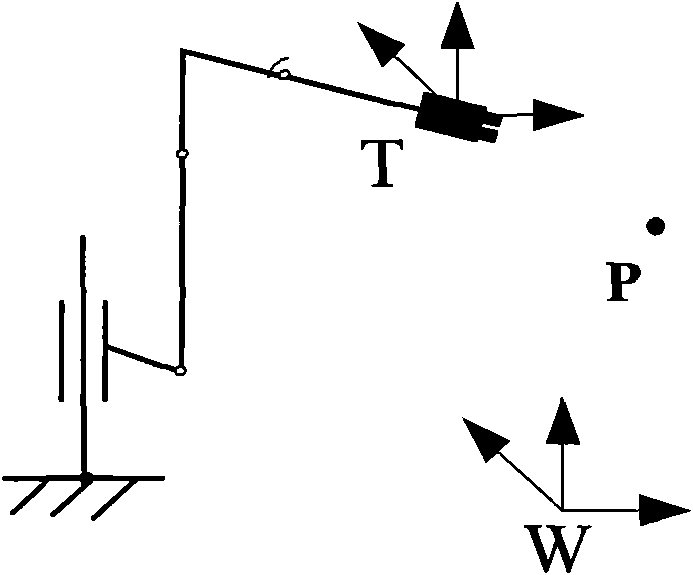
[0025] Combine figure 2 , {W} represents the world coordinate system, which is established on the measuring instrument, {T} represents the tool coordinate system is established on the terminal stereo imaging device. The purpose of robot positioning is to determine the coordinates of the space point P in the world coordinate system, and its homogeneous coordinates are expressed as X w , And th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More