

Composite recognition method for flight dynamics model of unmanned helicopter
An unmanned helicopter and flight dynamics technology, applied in the field of aerospace and unmanned aerial vehicles, can solve the problems of helicopter excitation, failure to solve the problem of helicopter flying out of sight, limited experiment time, etc., and achieve the effect of ensuring flight safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
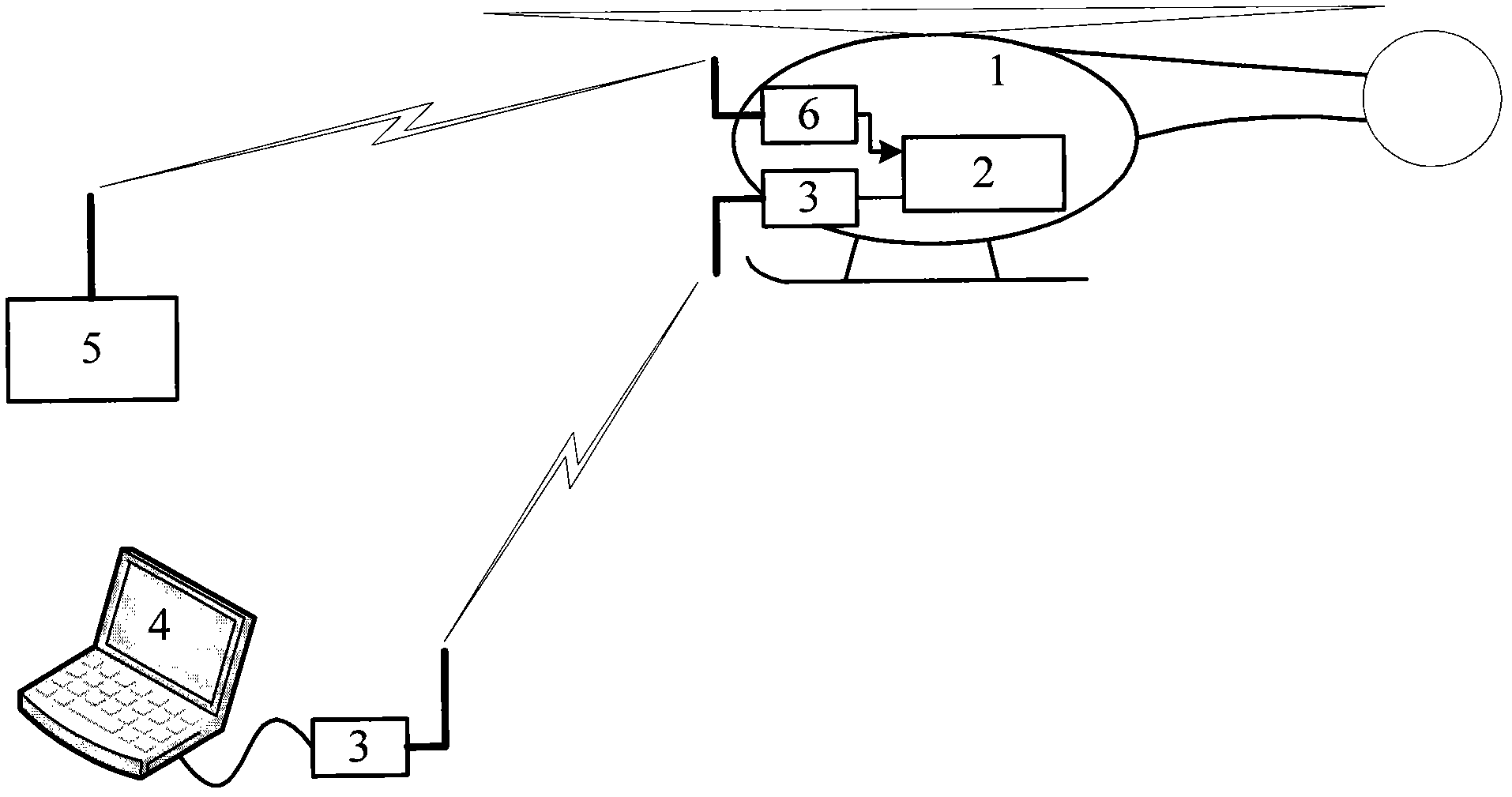
[0018] The composite identification method of unmanned helicopter flight dynamics model is mainly composed of unmanned helicopter (1), flight control computer (2), data station (3), ground station (4), remote control transmitter (5) and remote control receiver (6 ) and other components.
[0019] The ground station (4) is used for monitoring the flight of the unmanned helicopter (1) through the data station (3). The flight control computer (2) is used for auxiliary manipulation of the unmanned helicopter (1), on the one hand to ensure the flight safety of the unmanned helicopter (1), and on the other hand to ensure that its flight state does not change too much. Since the control algorithms such as PID can obtain the controller parameters without the need of a dynamic model, the controller parameters can be obtained through debugging in actual flight, so the flight control computer (2) can first use this type of control algorithm. After the identification experiment, the fligh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More