

Riding type robot for lower limb rehabilitation
A rehabilitation robot and riding technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of low patient comfort, complex algorithm, poor stability, etc., and achieve simple and compact structure, comfortable exercise process, and low cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
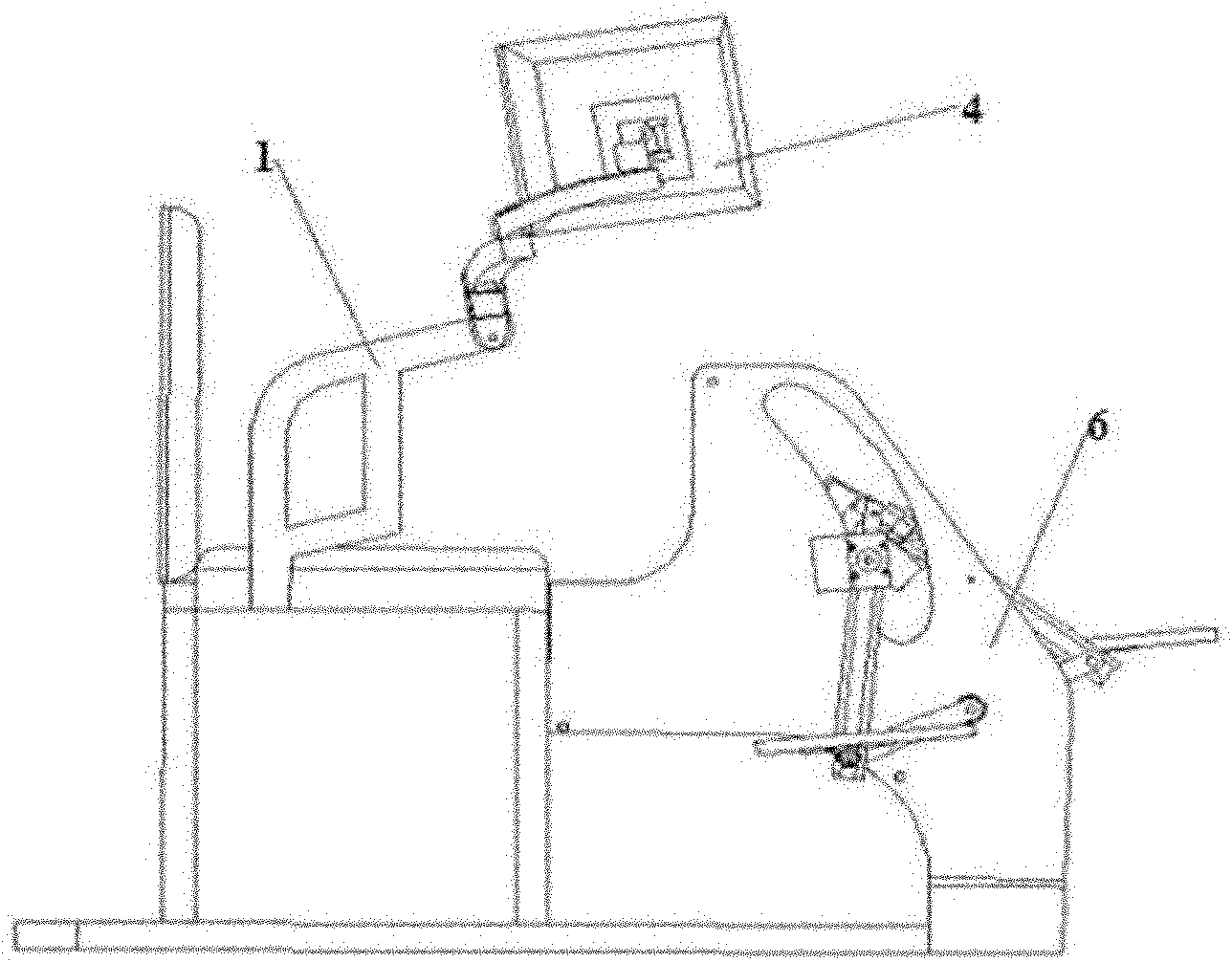
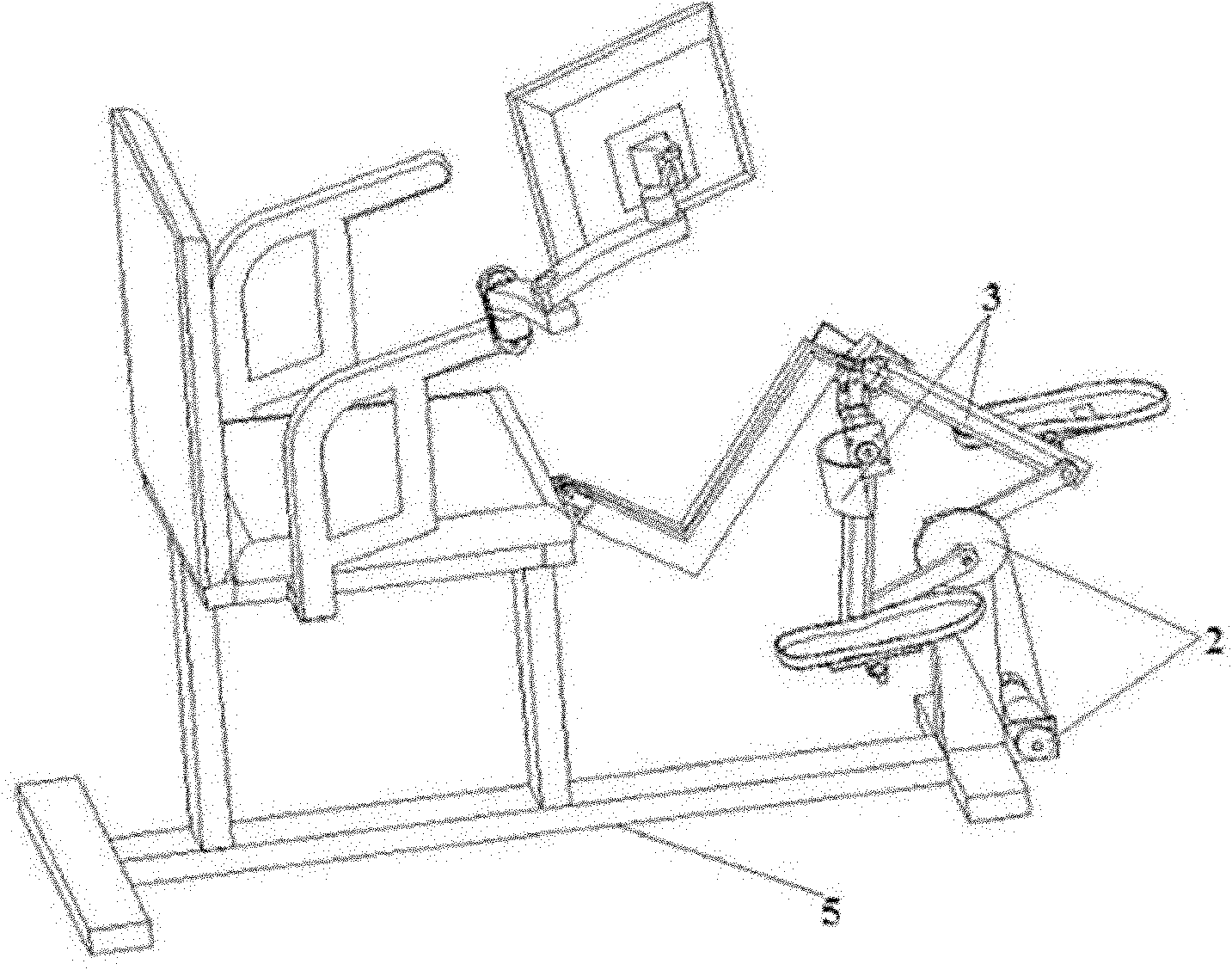
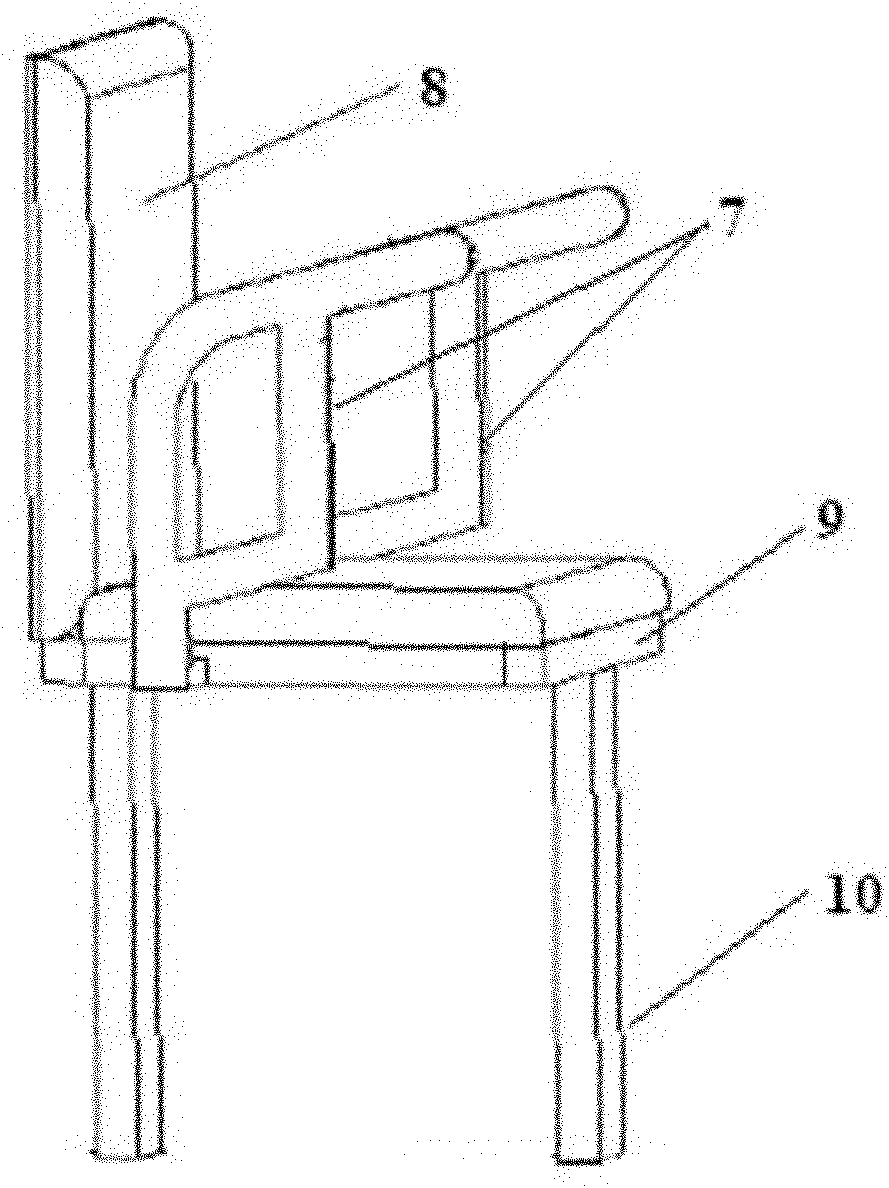
[0026] Such as Figure 1-6 As shown, this embodiment includes: riding seat 1, driving mechanism 2, exoskeleton mechanism 3, human-computer interaction mechanism 4, bracket 5 and shell 6, wherein: riding seat 1 is fixedly arranged on bracket 5, The human-computer interaction mechanism 4 is fixed on the riding seat 1, the exoskeleton mechanism 3 is fixedly connected to the riding seat 1, the exoskeleton mechanism 3 is movably connected to the driving mechanism 2, and the driving mechanism 2 is fixed on the bracket 5 And fixedly connected with the bracket 5, the two ends of the shell 6 are respectively fixedly connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More