

Train control system and railway control system
A technology of train control system and control system, which is applied in the field of control force system, and can solve problems such as inability to determine control instructions, time-consuming, and impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
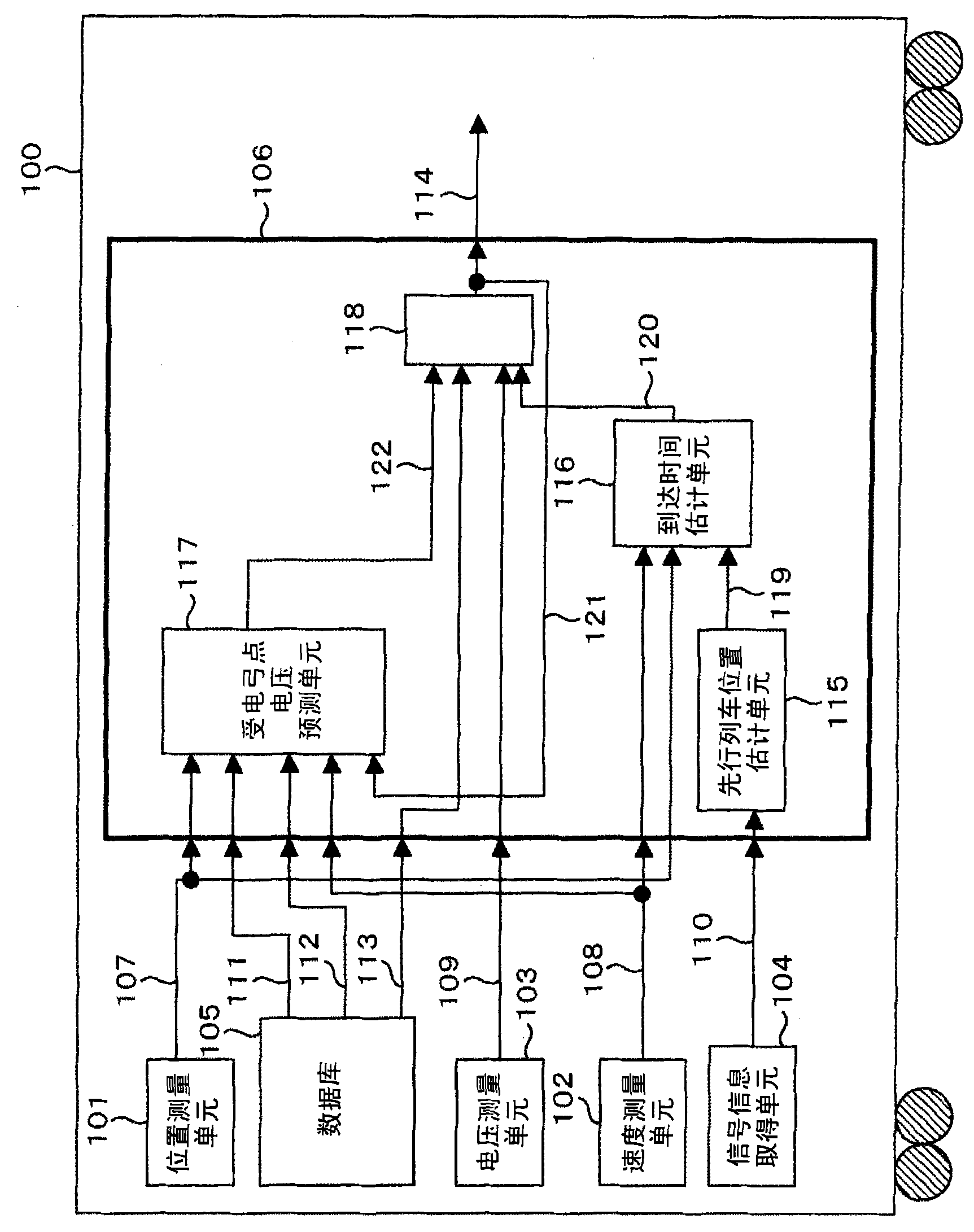
[0071] figure 1 This is an example of a train equipped with a train control system for realizing the present invention. The train control system used to realize the present invention consists of a position measuring unit 101 for measuring the position of the train, a speed measuring unit 102 for measuring the speed of the train, and a voltage on the pantograph of the train (hereinafter referred to as Pantograph point voltage) voltage measurement unit 103, signal information acquisition unit 104 for acquiring signal information given to the own train, database 105 for storing performance of the train, position of the substation, and time interval with the preceding train for control 1. The driving control unit 106 is formed. In addition, the driving control unit 106 uses the train position 107 obtained from the position measurement unit 101, the train speed 108 obtained from the speed measurement unit 102, and the pantograph of the own train obtained from the voltage measureme...
Embodiment 2
[0136] Next, use Figure 12 to Figure 14 A second embodiment in which control is performed based on peak cancellation command information from a substation will be described.
[0137] Figure 12 It is an example of a substation in the case of the second embodiment. The substation is composed of the following components: a substation current supply unit 1201, which supplies current to overhead wires; a substation current monitoring unit 1203, which monitors the current of the substation current supply unit 1201, and judges whether the supply load exceeds a specified value, and if it exceeds When the predetermined value is reached, the peak value elimination command information 1202 from the substation to the train is output; the substation information sending unit 1204 sends the peak value elimination command information 1202 from the substation to the train to all trains in the corresponding area.
[0138] Figure 13 It is an example of the train in the case of the second e...
Embodiment 3
[0141] Next, use Figure 15 ~ Figure 17 A third embodiment in which control is performed based on information from an operation management system that grasps the state of each train will be described.
[0142] Figure 15 It is a railway system in which each train is controlled based on information from an operation management system that grasps the state of each train. In addition, it is assumed that the trains 100a and 100b are running, and 100b is the preceding train. In this case, it is shown that the operation management system 1501 having grasped the train state calculates the time ratio Ht / Qt 1503 of the preceding train 100b and the subsequent train 100a based on the train state information 1502 of the preceding train 100b and timetable information not shown, and conveys to the subsequent train 100a, whereby the control is performed by the subsequent train 100a. In addition, although not shown in the figure, when another train (for example, 100c) exists after the subs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More