

Two-leg walking mechanism
A walking mechanism and double-leg technology, which is applied in the field of mobile robots, can solve the problems of increasing design, maintenance and control costs, reducing the flexibility of the mechanism, and increasing the load on the legs of the mechanism, so as to achieve a large bearing capacity, good rigidity and simple mechanism. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
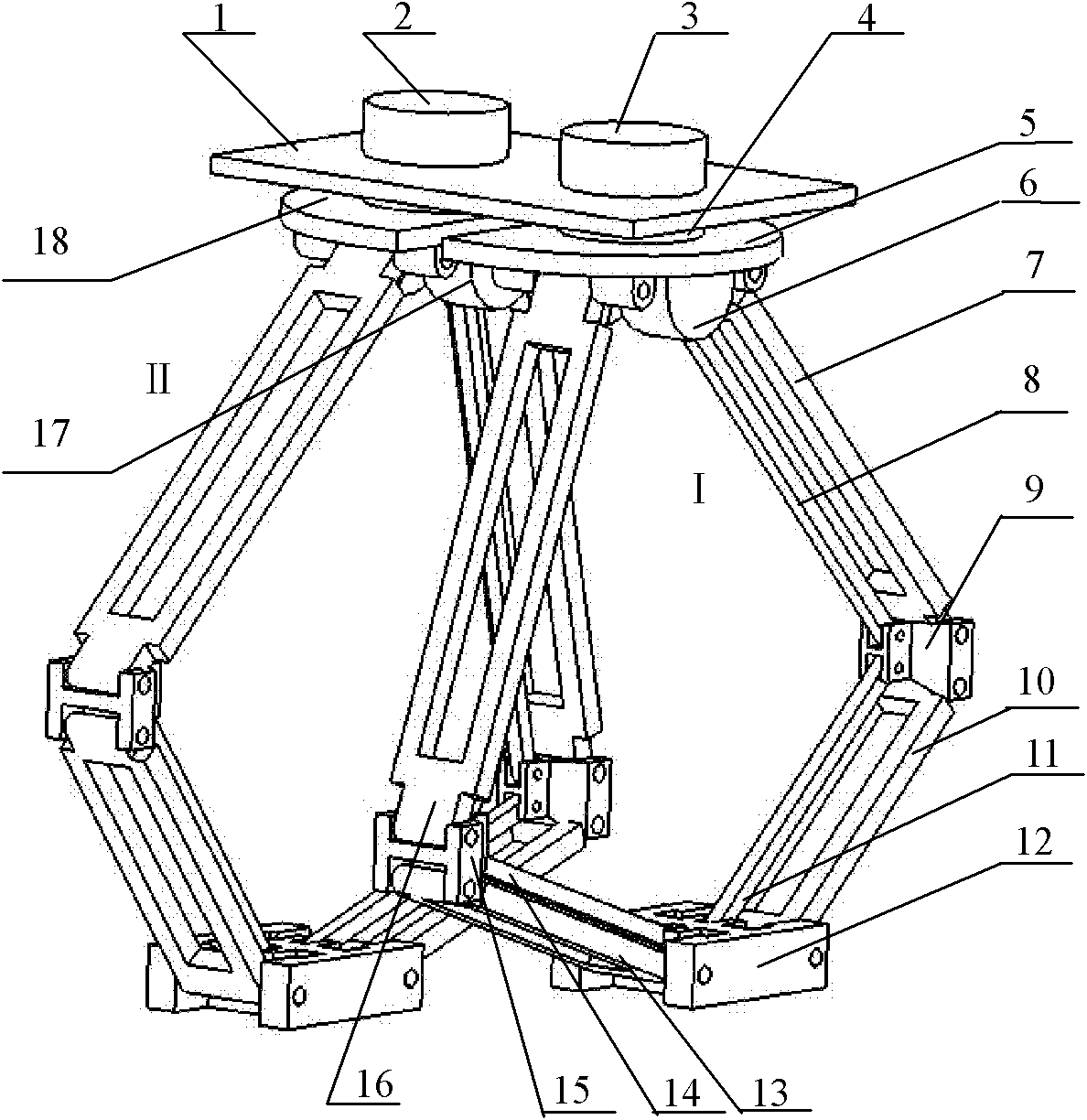
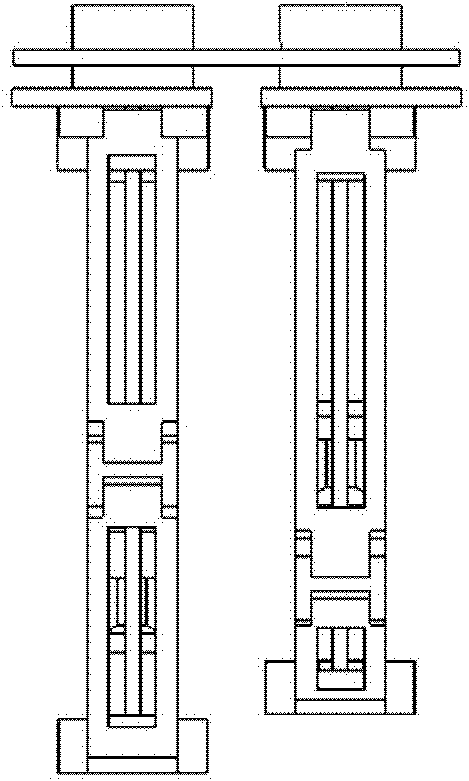
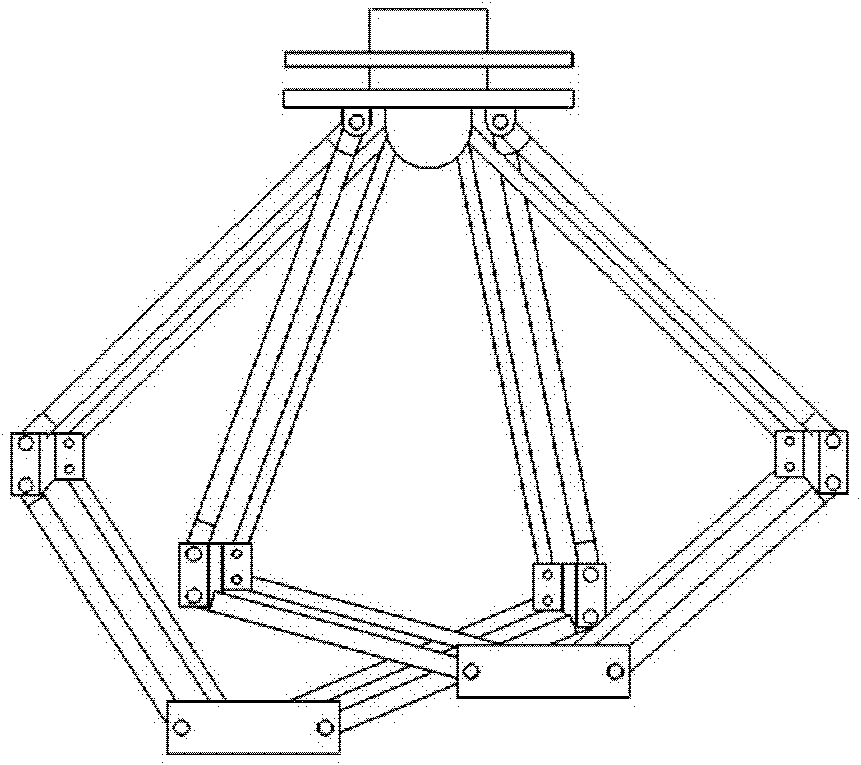
[0018] A kind of two-leg walking mechanism, it comprises platform (1), motor one (2), motor two (3), revolving pair one (4), turntable one (5), turntable two (18), leg one (1) And leg two (II); It is characterized in that leg one (I) and leg two (II) have identical structure, and is the closed-loop kinematic chain form, and leg one (I) is made up of motor three (6), active arm one (7) ), Auxiliary arm one (8), Hinge one (9), Slave arm one (10), Auxiliary arm two (11), Foot (12), Auxiliary arm three (13), Slave arm two (14), Hinge two (15), active arm two (16), motor four (17) form. Wherein motor one (2), motor two (3) control the turning motion of leg two (II) and leg one (I) respectively, to realize the turning motion of mechanism; For leg one (I), by controlling motor three (6) , four motors (17) drive active arm one (7) and active arm two (16) to rotate respectively, thereby realizing lifting and landing motion of pin (12), the control of leg two (II) is realized with leg ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More