

Decoupling three-rotation parallel mechanism for imaginary axis lathe and robot
A robot, three-rotation technology, applied in manipulators, program-controlled manipulators, metal processing mechanical parts, etc., can solve the problems of low motion accuracy, inconvenient control, complex structure, etc., and achieve a small moment of inertia, simple control, and motion decoupling. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below in conjunction with specific embodiment, further illustrate the present invention. The drawings show a preferred embodiment of the present invention, and the technical solution of the present invention is not limited to this embodiment.
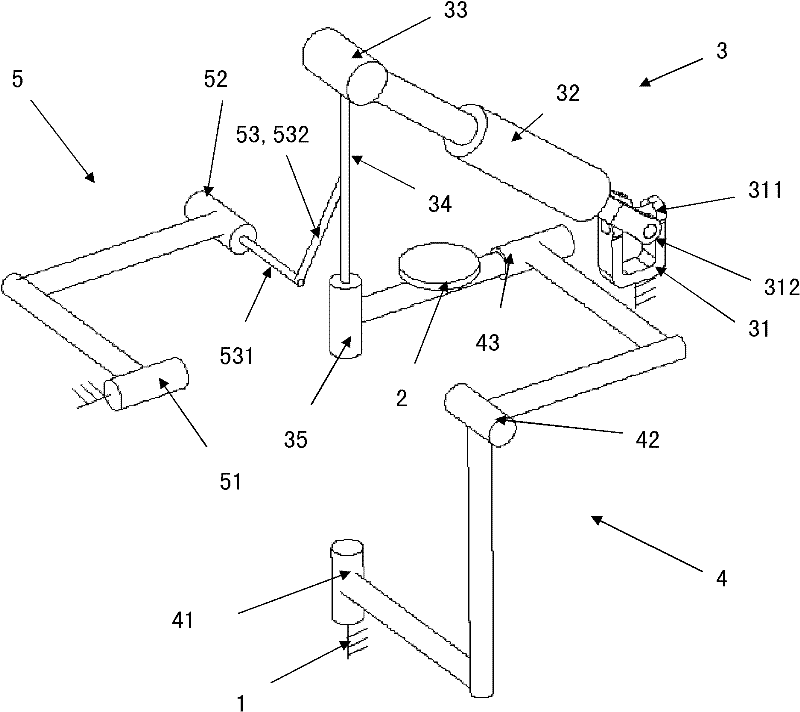
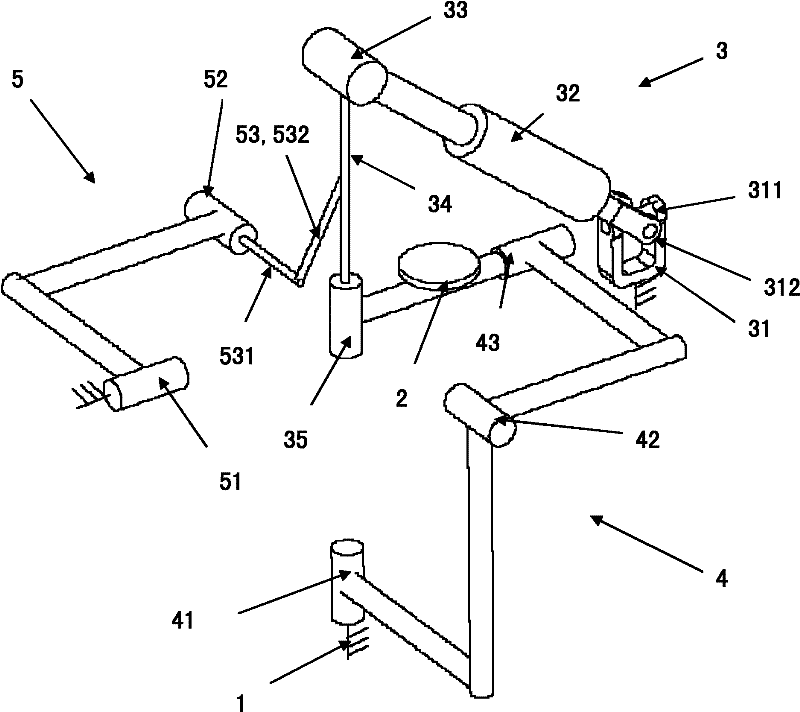
[0020] see figure 1 , the present invention is a decoupling three-rotation parallel mechanism for imaginary-axis machine tools and robots, including a static platform 1, a dynamic platform 2, and a first kinematic branch chain 3 connected between the static platform 1 and the dynamic platform 2, a second Kinematic branch 4 and the third kinematic branch 5 .
[0021] The first motion branch chain 3 comprises universal hinge 31, moving pair 32, first rotating pair 33, first connecting rod 34 and second rotating pair 35 that are connected in sequence; Universal hinge 31 is also connected with static platform 1, and second The revolving pair 35 is also connected with the moving platform 2 .
[0022] The second motion branch chain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More