

Multifunctional robot with slippage sensor for helping aged people to walk
A walking aid robot and robot technology, which is applied in the field of intelligent robot research, can solve the problems of user injury, misjudgment, inability to help the elderly, etc., and achieve the effects of not easily falling, convenient travel, and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The above solution will be further described below in conjunction with specific embodiments. It should be understood that these examples are used to illustrate the present invention and not to limit the scope of the present invention. The implementation conditions used in the examples can be further adjusted according to the conditions of specific manufacturers, and the implementation conditions not indicated are usually the conditions in routine experiments.
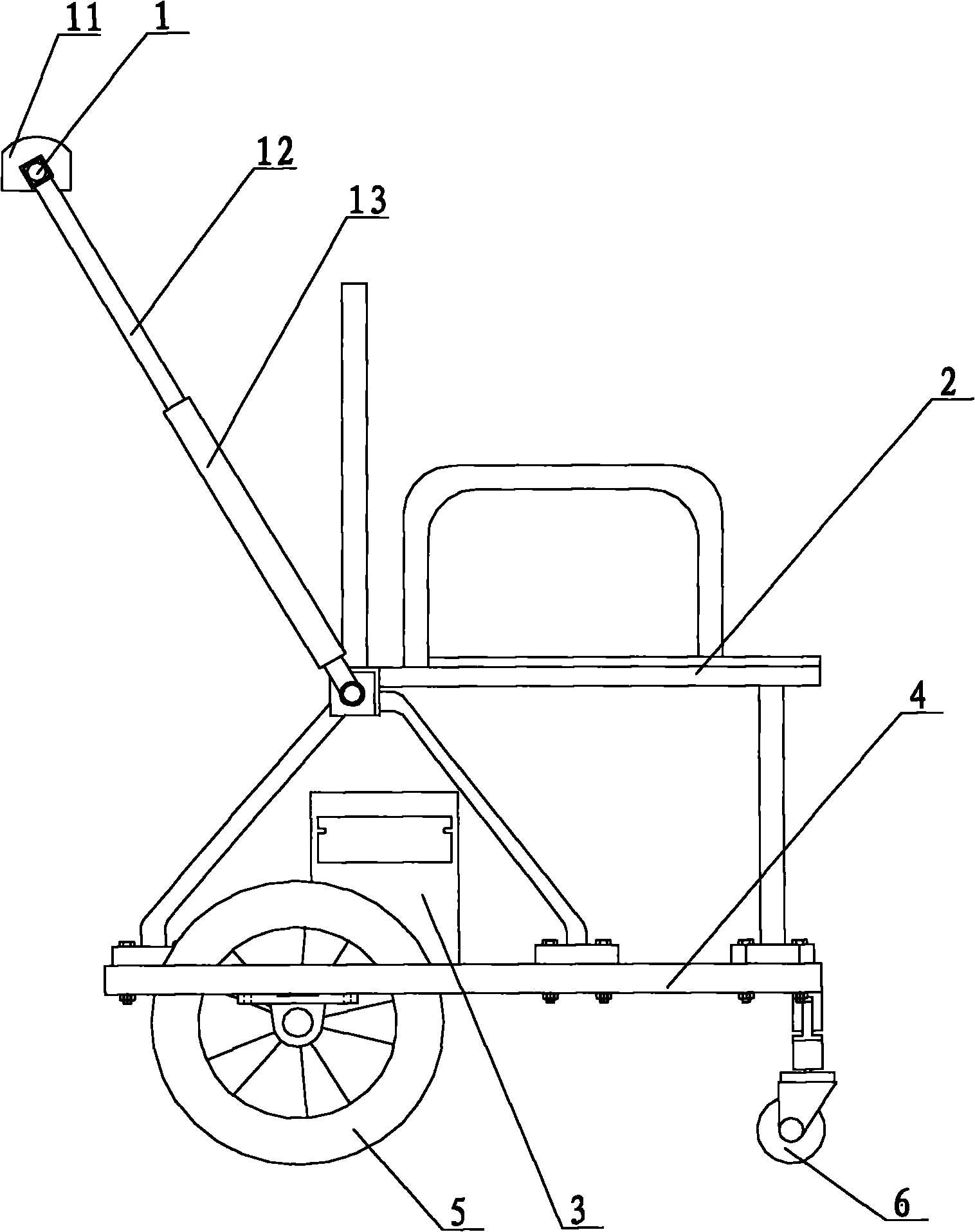
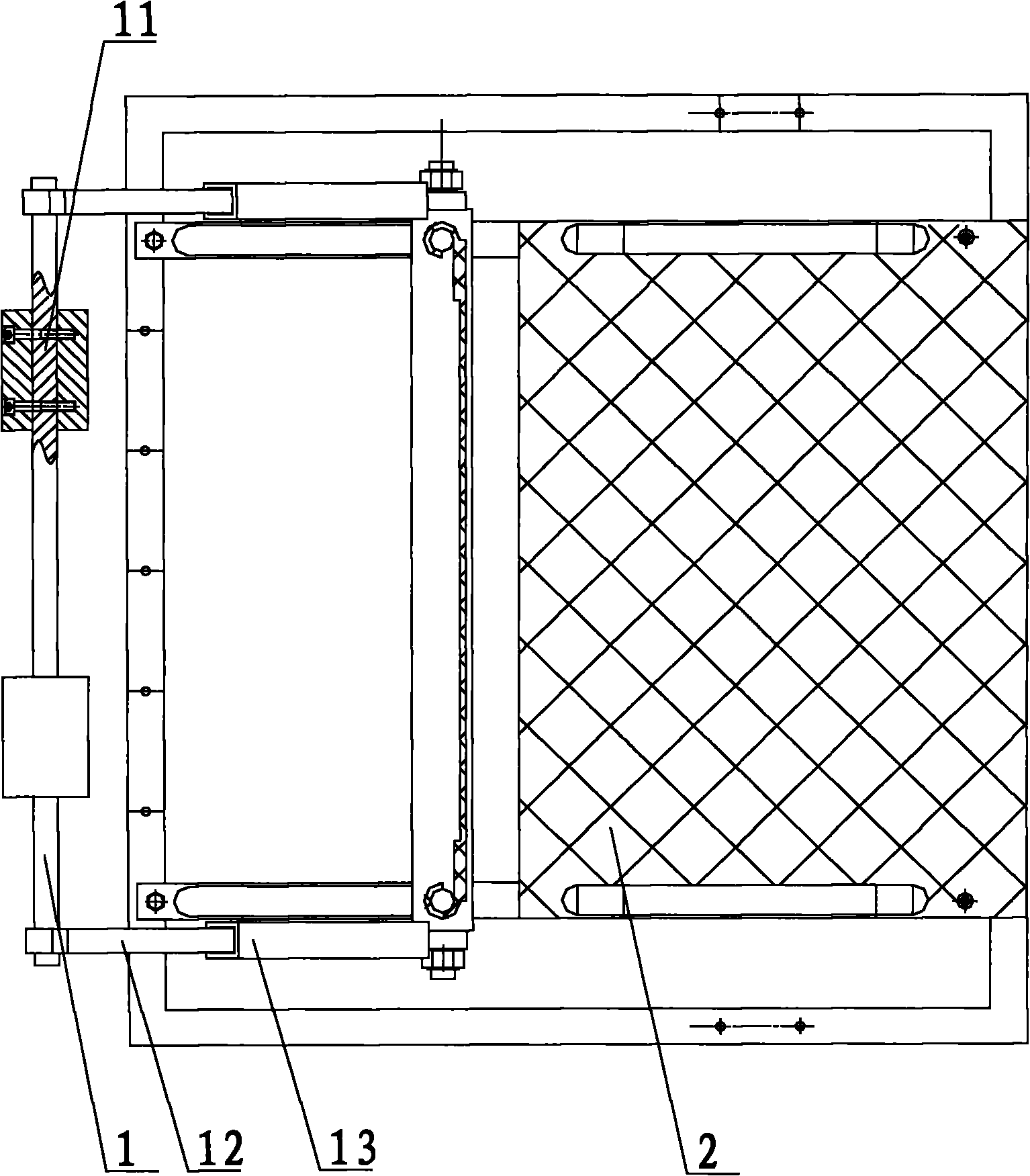
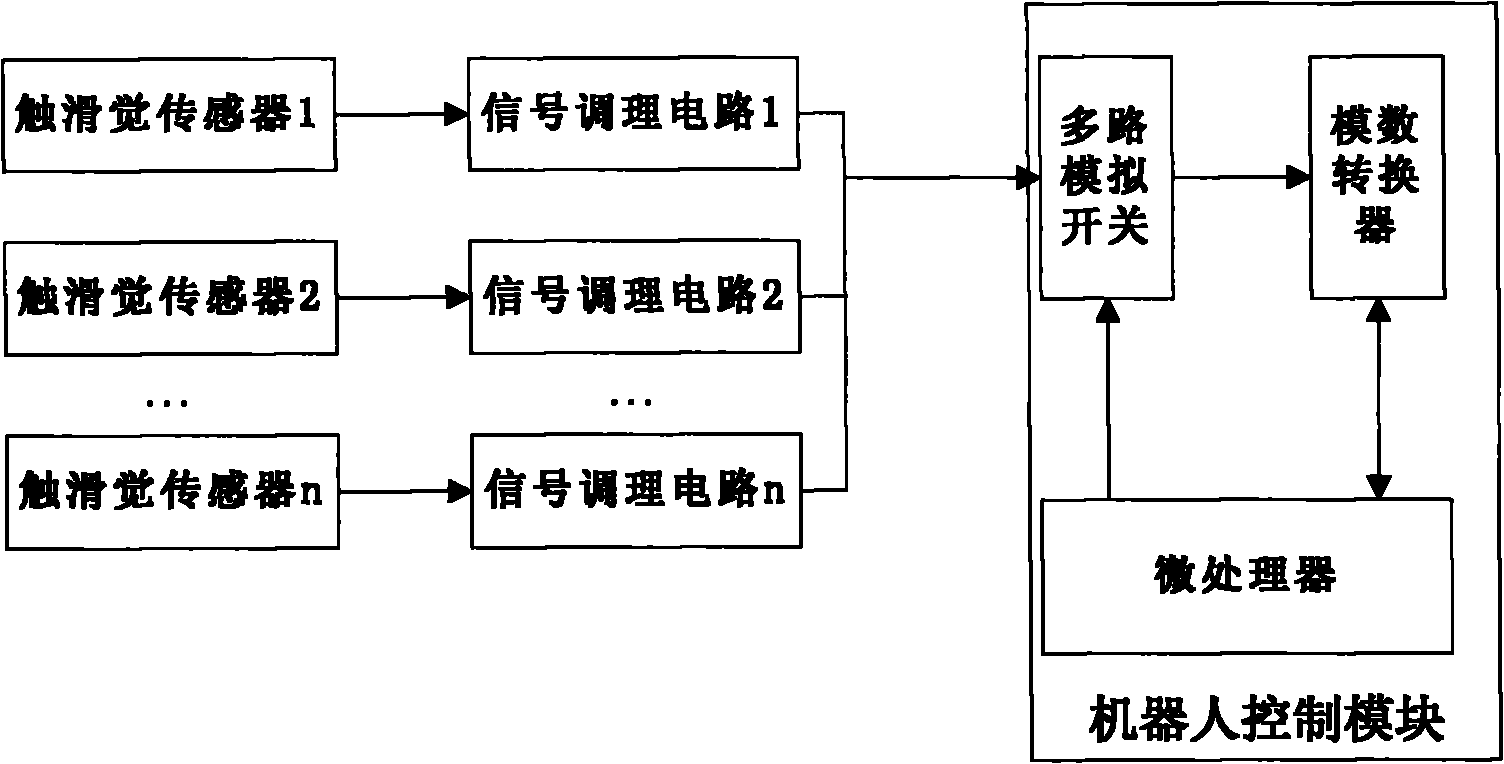
[0041] Example Figure 1~4 As shown, the multifunctional walk-aid robot for the elderly with a touch-slip sensor includes a robot armrest 1, a robot seat 2 and a robot controller 3 for controlling the walking of the robot. The touch-slip sensor is connected to the robot controller 3 through a signal conditioning circuit, and the robot controller 3 judges the user's behavior or state according to the sensor signal collected by the touch-slip sensor, and drives The robot produces auxiliary actions; the robot seat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More