

Symmetrical-structure parallel mechanism having two-turn-one-shift three degrees of freedom
A technology with symmetrical structure and degrees of freedom, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of complex kinematic models and difficult calibration, and achieve the effect of simplified kinematics description, high stiffness, and easy control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] Further description will be given below in conjunction with the embodiments shown in the accompanying drawings.
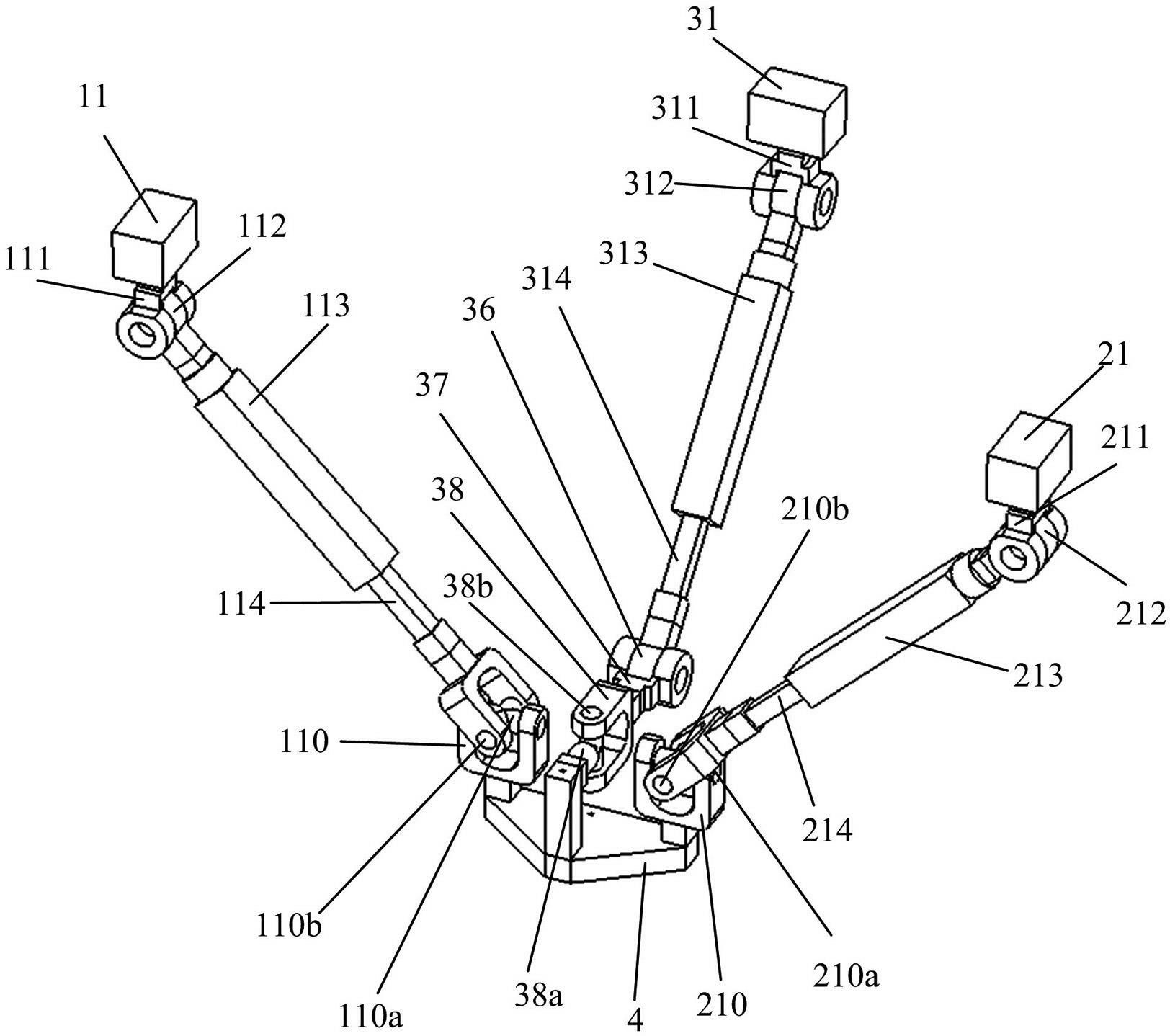
[0016] In the embodiment, the axes of the two rotating pairs in the universal hinge of each branch are perpendicular to each other and intersect; the center point of the universal hinge is the intersection point of the axes of the two rotating pairs in the universal hinge; The first rotating shaft in the universal joint 18, the universal joint 28 and the universal joint 38 mentioned above is respectively the rotation pair of the universal joint directly connected to the moving platform. In addition, at least one of the single-degree-of-freedom kinematic pairs in each branch is an active moving pair or an active rotating pair, and the driving mechanism of the active moving pair is a screw mechanism driven by a motor, or a servo motor, and the active rotating pair The driving mechanism is a reducer driven by a motor. The above are all conventional designs of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More