

Wheel-legged combined-type robot platform
A mobile robot and composite technology, applied in the field of robots, can solve the problems of poor load capacity and endurance, low efficiency, low travel efficiency, etc., and achieve the effects of strong terrain adaptability, improved efficiency and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Describe the present invention in detail below in conjunction with embodiment and accompanying drawing. The embodiment is based on the specific implementation carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes. However, the protection scope of the claims in the application of the present invention is not limited to the description scope of the embodiments.
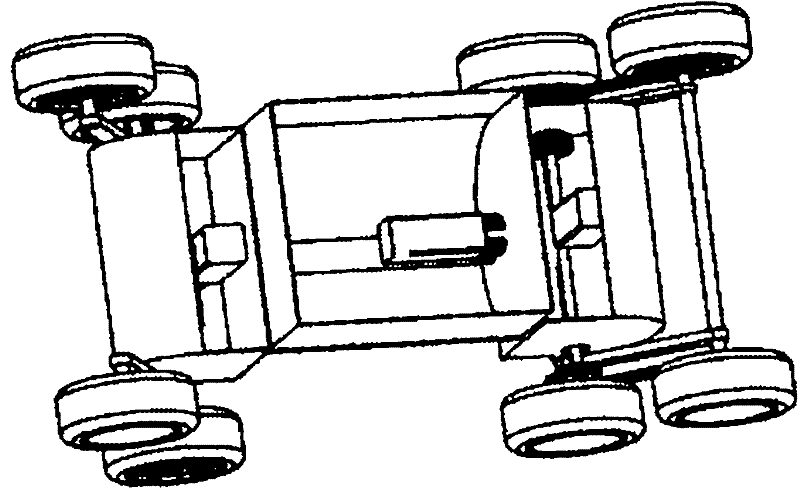
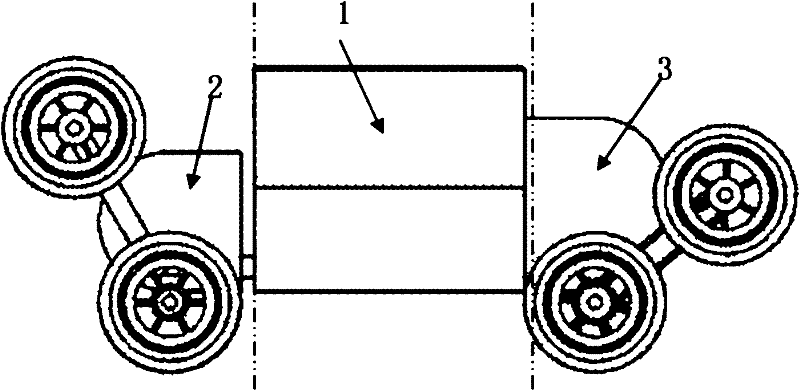
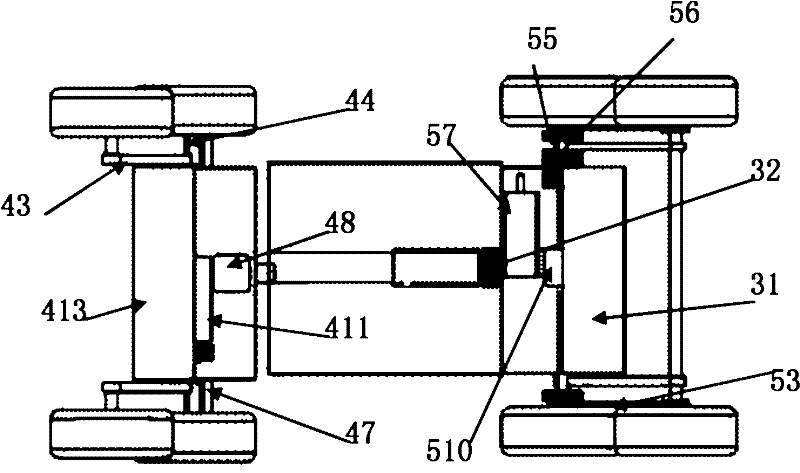
[0020] The wheel-leg compound mobile robot platform designed by the present invention (hereinafter referred to as robot or platform, see Figure 1-6 ) follows the robot modular design idea and adopts modular design. The specific structural features are:
[0021] The platform of the present invention can be divided into three parts as a whole, namely the vehicle body 1 positioned at the middle part, the front vehicle body 2 positioned at the front portion of the vehicle body 1 and the rear vehicle body 3 positioned at the rear po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More