Pneumatic mechanical claw for picking up bearing
A technology of manipulator claws and bearings, applied in the field of manipulators, can solve problems such as high cost, complex manipulator structure, and difficulty in manufacturing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
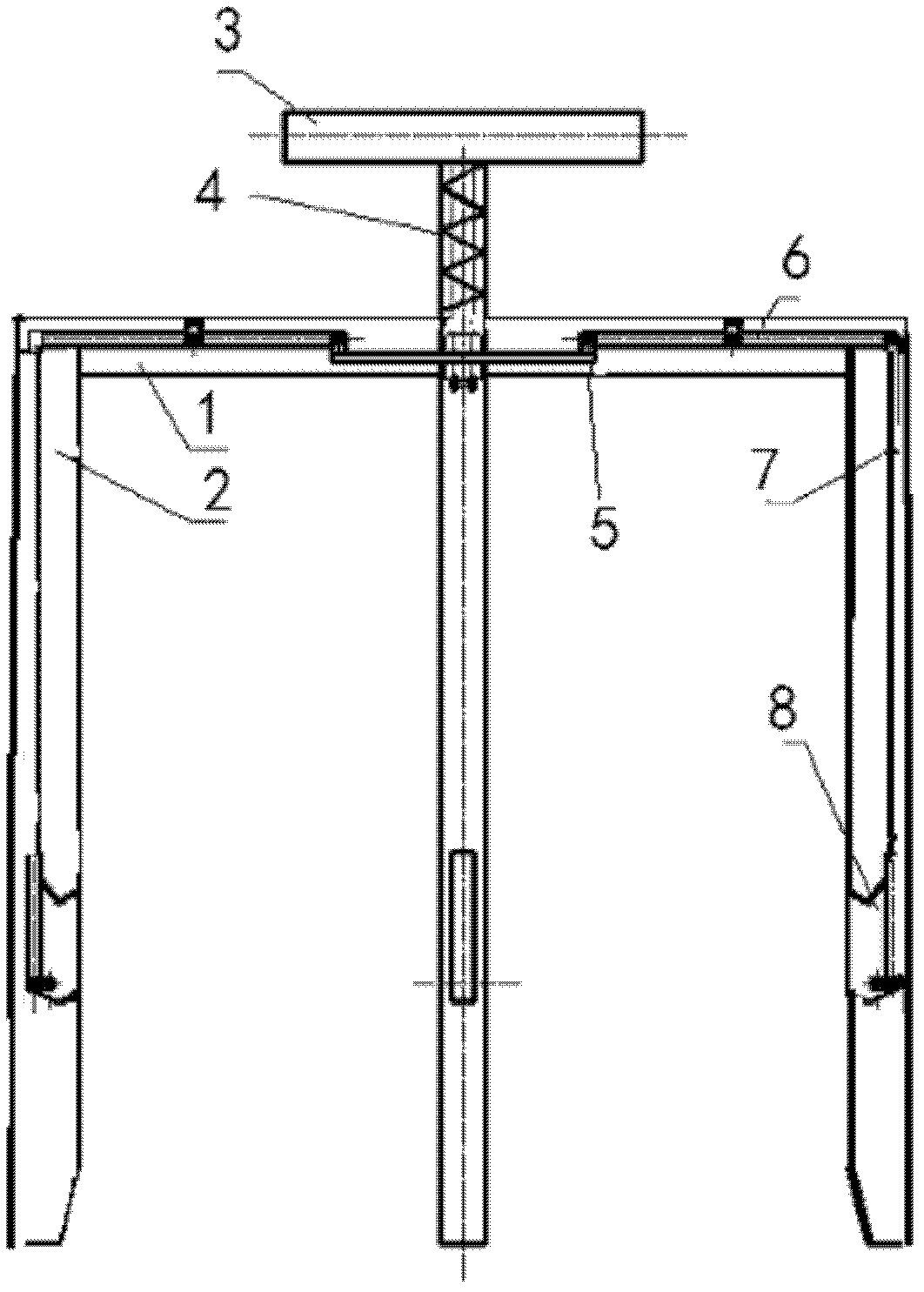
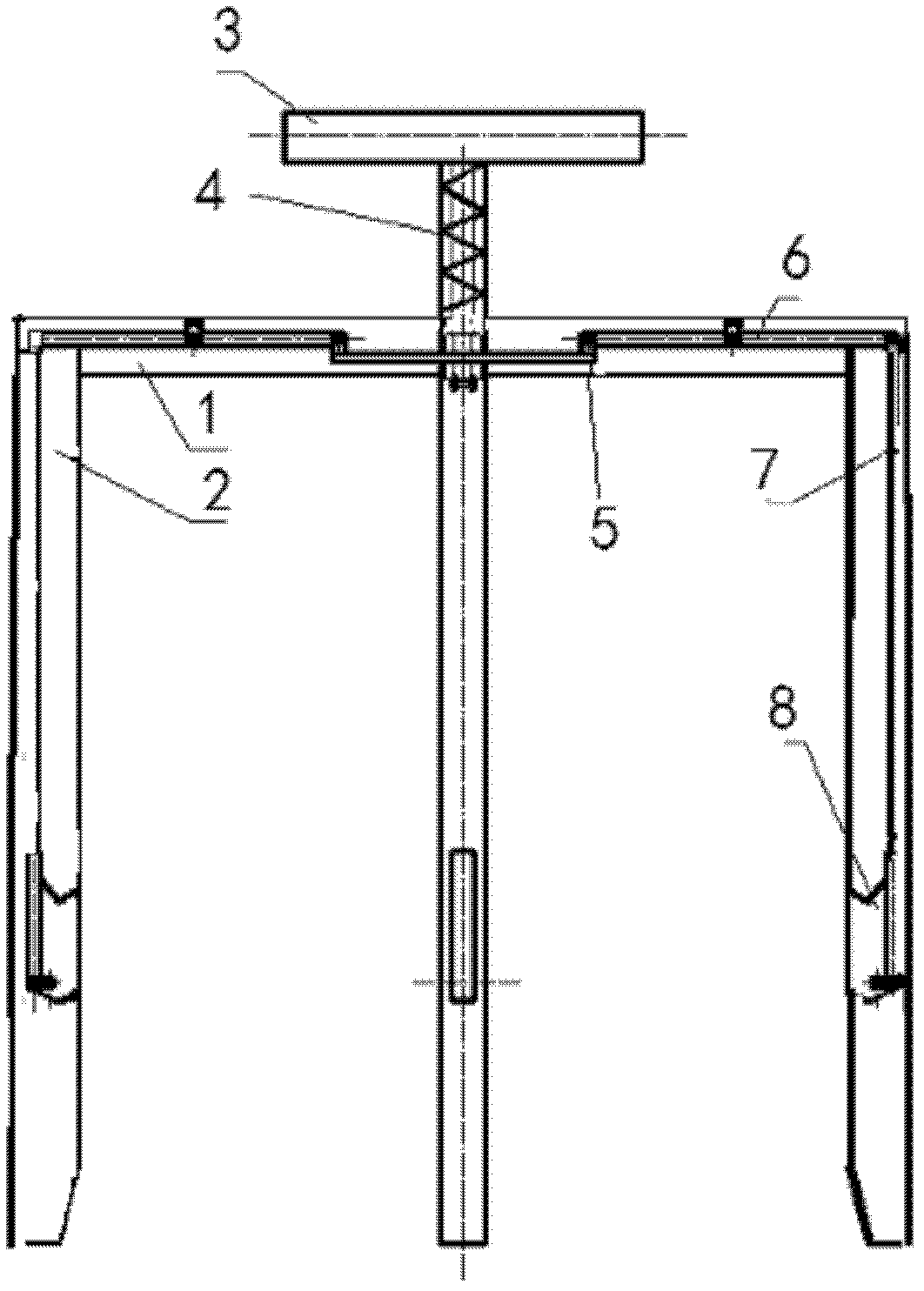
[0011] Pneumatic grippers for picking bearings, e.g. figure 1 As shown, it includes a triangular upper cover 1, three fixed arms 2, a movable handle 3, a lever connecting body 5, a lever 6, a connecting rod 7, and a movable claw 8. The movable handle 3 is provided with a spring 4, and the upper cover 1 is connected to the fixed arm 2, the movable handle 3 is connected to the lever 6, the lever connecting body 5 is connected to the lever 6, the lever 6 is connected to the connecting rod 7, and the connecting rod 7 is connected to the movable claw 8. link, the lever 7 is movably linked with the triangular upper cover 1, and the movable claw 8 is movably linked with the fixed arm 2. The movable handle 3 and the lever 6 are fastened by bolts.
[0012] Although the specific implementation of the invention has been described above in conjunction with the ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com