

High-rigidity redundantly-actuated three-degree-of-freedom parallel mechanism
A technology with a degree of freedom and high rigidity, which is applied in the direction of metal processing machinery parts, large fixed members, metal processing equipment, etc., can solve problems such as unrealizable, high rigidity, and poor bearing capacity of the mechanism, and achieve easy control, high rigidity, and manufacturing The effect of cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
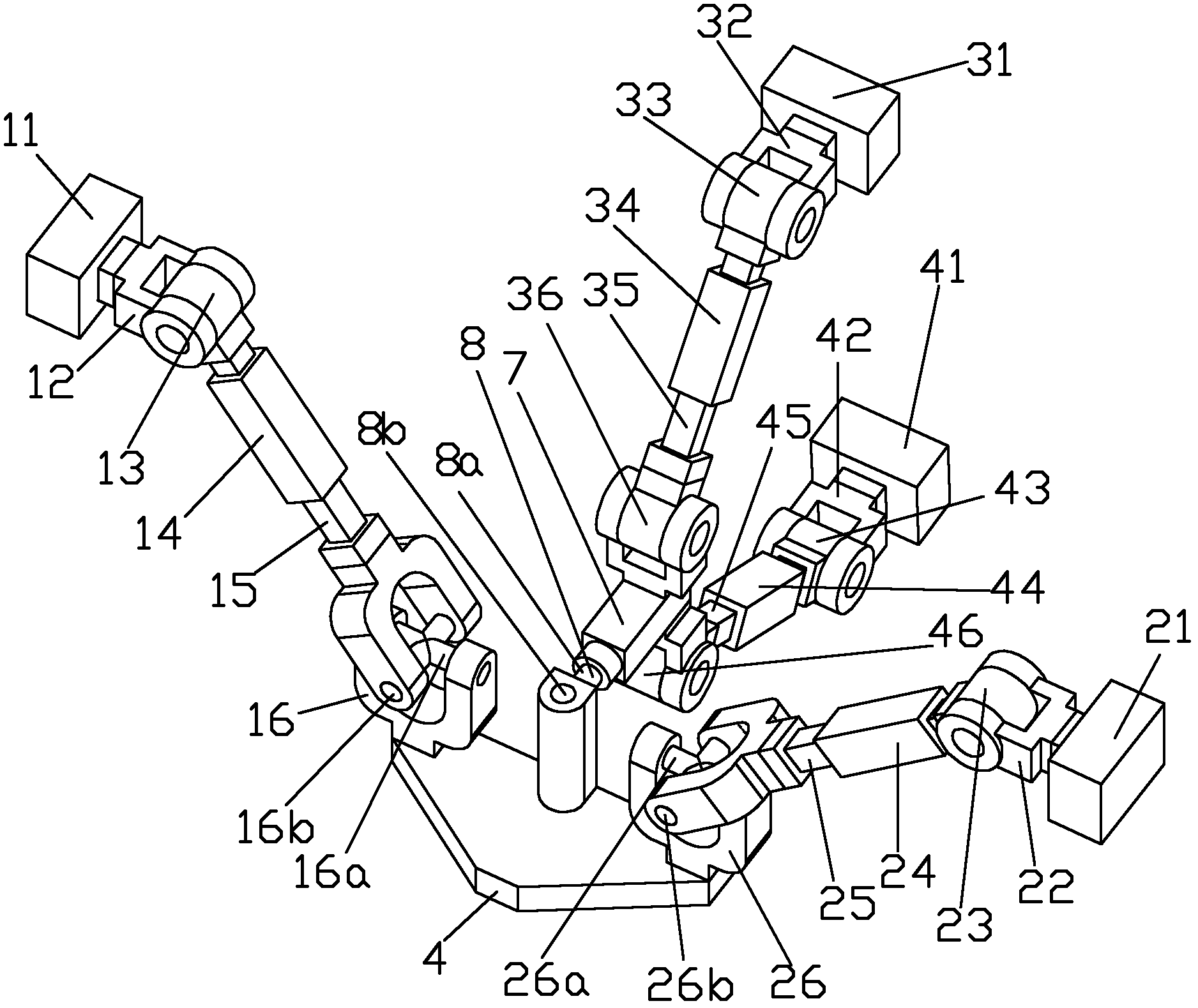
[0025] like figure 1 As shown, the moving platform 4 is connected with the frame 11, the frame 21, the frame 31 and the frame 41 through three branches; the first single-degree-of-freedom kinematic pair and the second single-degree-of-freedom kinematic pair in the first branch are respectively The rotating pair 13 and the moving pair 14, the frame 11 are connected with the moving platform 4 through the first connecting rod 12, the rotating pair 13, the moving pair 14, the second connecting rod 15 and the universal hinge 16 in turn; the first in the second branch The single-degree-of-freedom kinematic pair and the second single-degree-of-freedom kinematic pair are the rotating pair 23 and the moving pair 24 respectively, and the frame 21 passes through the first connecting rod 22, the rotating pair 23, the moving pair 24, the second connecting rod 25 and the universal The hinge 26 is connected with the moving platform 4; the first single-degree-of-freedom kinematic pair and the...
Embodiment 2
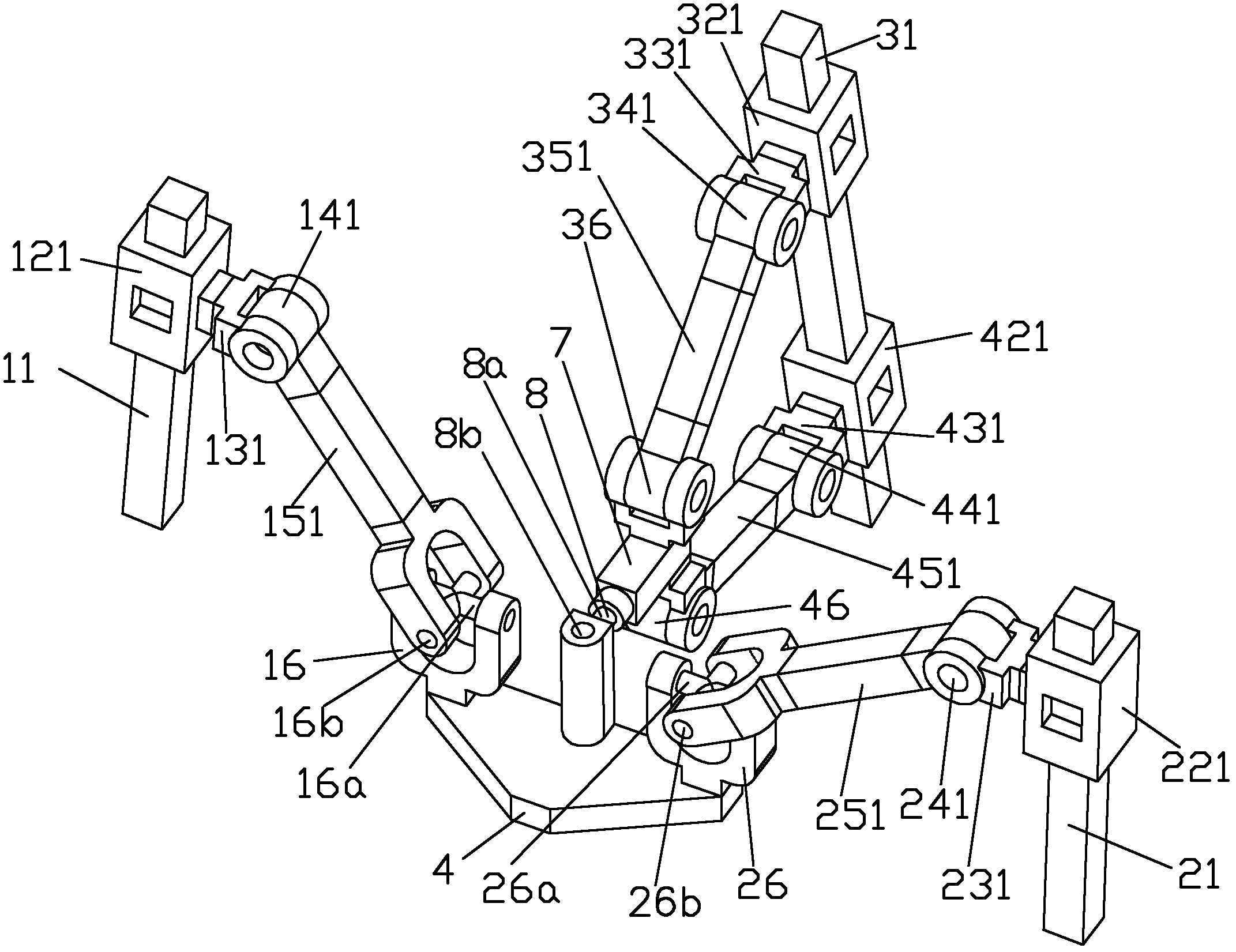
[0028] like figure 2As shown, the moving platform 4 is connected with the frame 11, the frame 21, and the frame 31 through three branches; the first single-degree-of-freedom kinematic pair and the second single-degree-of-freedom kinematic pair in the first branch are respectively the mobile pair 121 and the second single-degree-of-freedom kinematic pair. The rotating pair 141, the frame 11 is connected with the moving platform 4 through the moving pair 121, the first connecting rod 131, the rotating pair 141, the second connecting rod 151 and the universal hinge 16 in turn; the first single degree of freedom movement in the second branch pair and the second single-degree-of-freedom kinematic pair are respectively a moving pair 221 and a rotating pair 241. The platform 4 is connected; the first single-degree-of-freedom kinematic pair and the second single-degree-of-freedom kinematic pair of the first branch chain in the third branch are respectively the moving pair 321 and the...
Embodiment 3
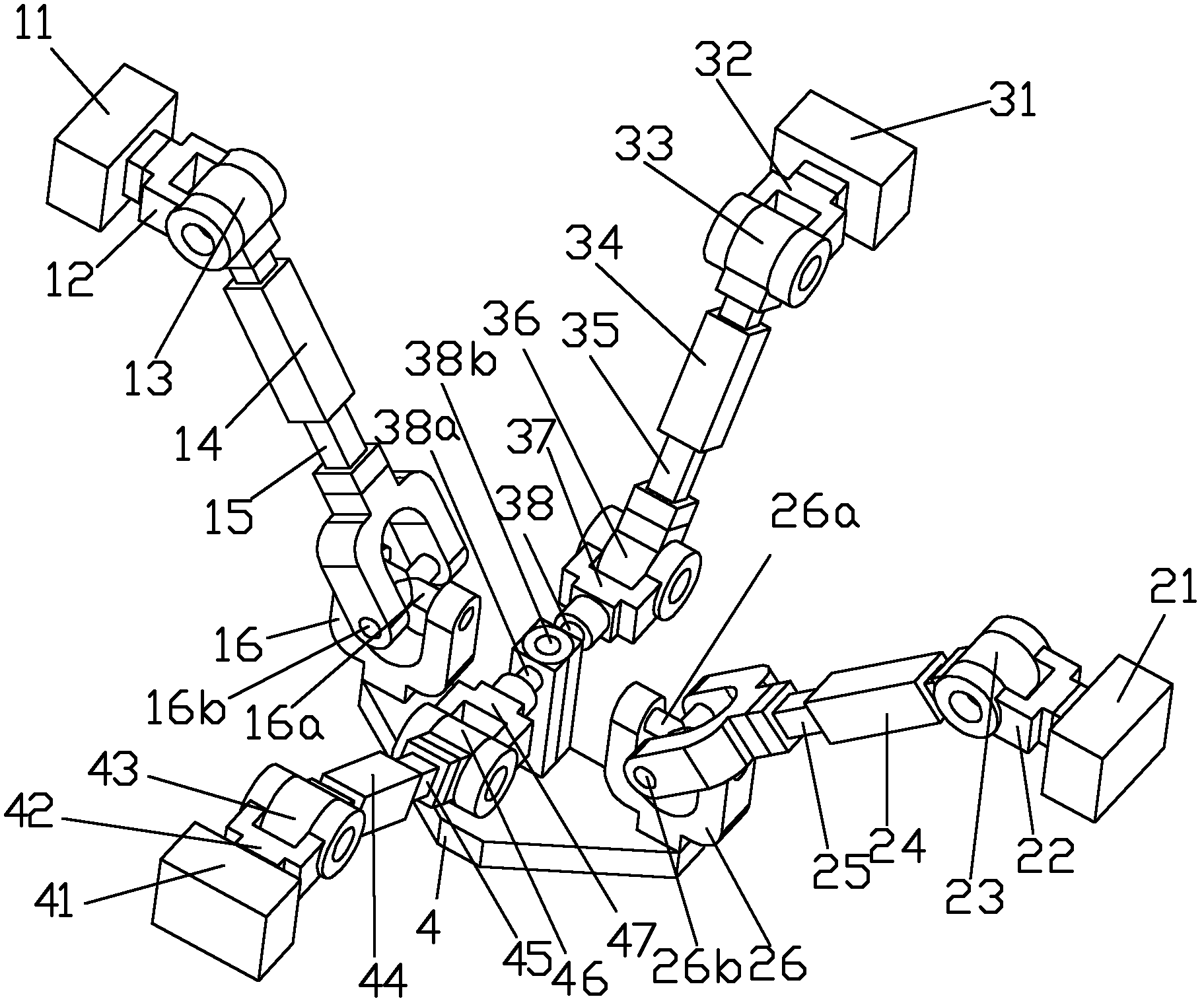
[0034] like image 3 As shown, the moving platform 4 is connected with the frame 11, the frame 21, the frame 31 and the frame 41 through three branches; the first single-degree-of-freedom kinematic pair and the second single-degree-of-freedom kinematic pair in the first branch are respectively The rotating pair 13 and the moving pair 14, the frame 11 are connected with the moving platform 4 through the first connecting rod 12, the rotating pair 13, the moving pair 14, the second connecting rod 15 and the universal hinge 16 in turn; the first in the second branch The single-degree-of-freedom kinematic pair and the second single-degree-of-freedom kinematic pair are the rotating pair 23 and the moving pair 24 respectively, and the frame 21 passes through the first connecting rod 22, the rotating pair 23, the moving pair 24, the second connecting rod 25 and the universal The hinge 26 is connected with the moving platform 4 . The two branches in the third branch are distributed sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More