

Wheel foot type wall climbing robot mechanism
A wall-climbing robot and wheel-foot technology, which is applied to motor vehicles, transportation and packaging, etc., can solve problems such as poor motion performance, complex mechanism structure, and high power consumption, and achieve good surface adaptability, wide application range, and obstacle surmounting powerful effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
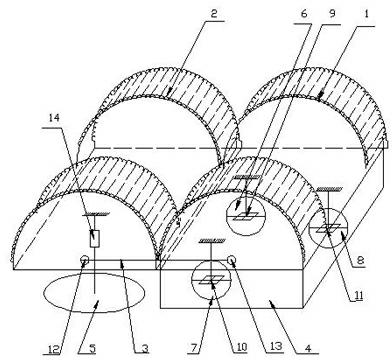
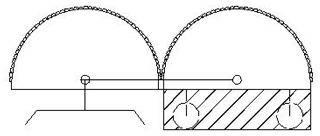
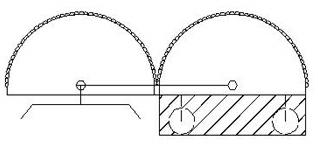
[0029] Such as figure 1 As shown, the wheel-foot type wall-climbing robot mechanism includes a semi-cylindrical first body 1 and a second body 2, a connecting rod 3, a first suction cup foot 4 and a second suction cup foot 5, wherein the first body 1 and the second body 2 The lower part is respectively provided with a first suction cup foot 4 and a second suction cup foot 5, the axes of the first body 1 and the second body 2 are parallel, and they are arranged in parallel in a contact manner, and the two ends of the two bodies are respectively connected by connecting rods. It has a structure capable of relative rotation; the first suction cup foot 4 adopts a negative pressure adsorption structure, and the second suction cup foot 5 adopts a vacuum adsorption structure; the first body 1 is provided with walking wheels. The first body 1 and the second body 2 have the same structure, and both have supporting plates on which a semicircular track that allows the two bodies to roll r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More