

Coupling optimization control method for leg-wheel robot
A technology for optimizing control and robotics, which is applied in the field of automation to achieve the effects of improving control efficiency, improving motion characteristics, and improving motion capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below with reference to the accompanying drawings and examples.
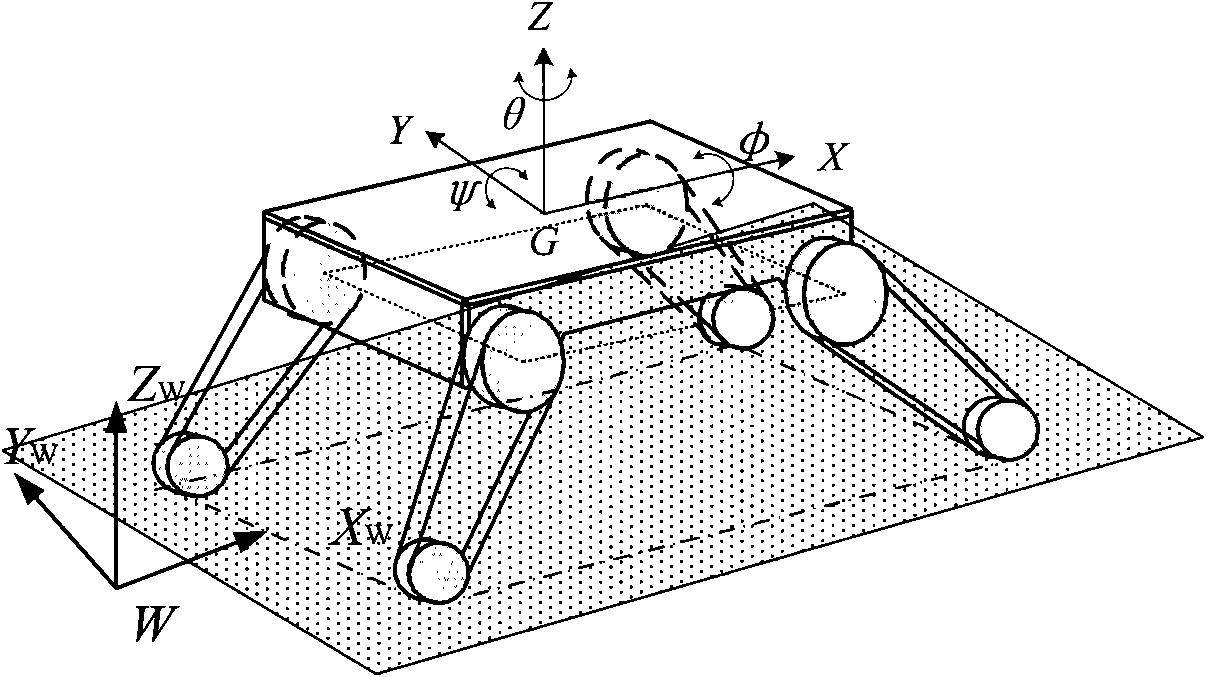
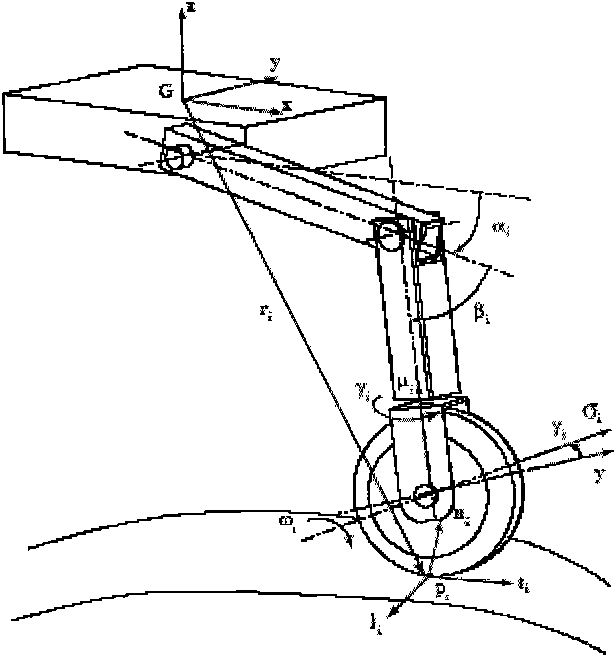
[0026] As shown in Figure 1, it is a schematic diagram of the structure of the wheel-legged robot involved in the present invention.
[0027] In the field of robotics, a robot system that has legs and wheels and can be driven independently is generally called a wheel-legged robot. Due to different application purposes, wheel-legged robots can have different forms. The wheel-legged robot shown in Figure 1(a) has a leg with a joint swing degree of freedom and a wheel drive at the end; The wheel-legged robot shown in 1(b) has a leg with two joints of swing DOF and a wheel drive at the end. Due to different research purposes, similar mechanisms have been adopted internationally from small experimental wheel-legged robots to lunar landing robots and Mars exploration robots. Although the specific structure is different, these robots have some common characteri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More