

Spatial three-dimensional vision-computing verification method
A technology of 3D vision and verification method, which is applied in the field of spatial 3D vision computing verification, and can solve the problems that the visual system error cannot be given quantitatively.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The space three-dimensional visual computing verification method of the present invention is described in detail below in conjunction with the accompanying drawings:
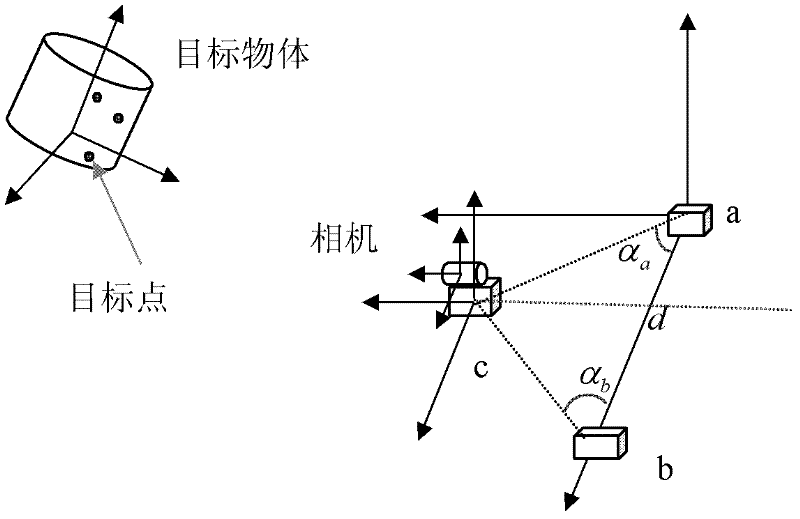
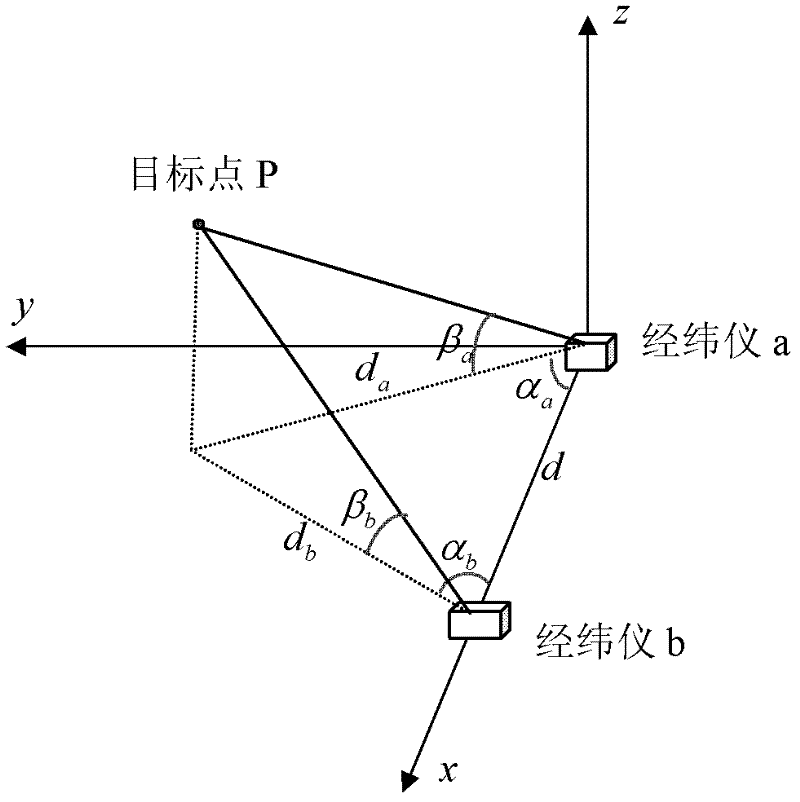
[0028] First, the coordinate system involved in the present invention is briefly described. see figure 2 As shown, the reference coordinate system is constructed by theodolite a and theodolite b, and its main purpose is to link other rectangular coordinate systems. The target object coordinate system, with a point on the target object as the origin, is used to describe the coordinates of the target point in its own coordinate system. The camera coordinate system is a Cartesian coordinate system established with the optical center as the origin and the optical axis as the z direction. At the same time, each theodolite itself also establishes a rectangular coordinate system.
[0029] The implementation steps of the present invention are described in detail below:
[0030] The first step is to establish...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More