

Master-slave control robot work platform for high-voltage live working
A working platform and high-voltage electrified technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve personal casualty accidents, minor accidents, avoid touching wires or other live equipment, safety accidents and other problems during operation, and ensure the safety of man and machine , The effect of improving the safety of live operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Below in conjunction with accompanying drawing and embodiment the novel of the present invention is further described.
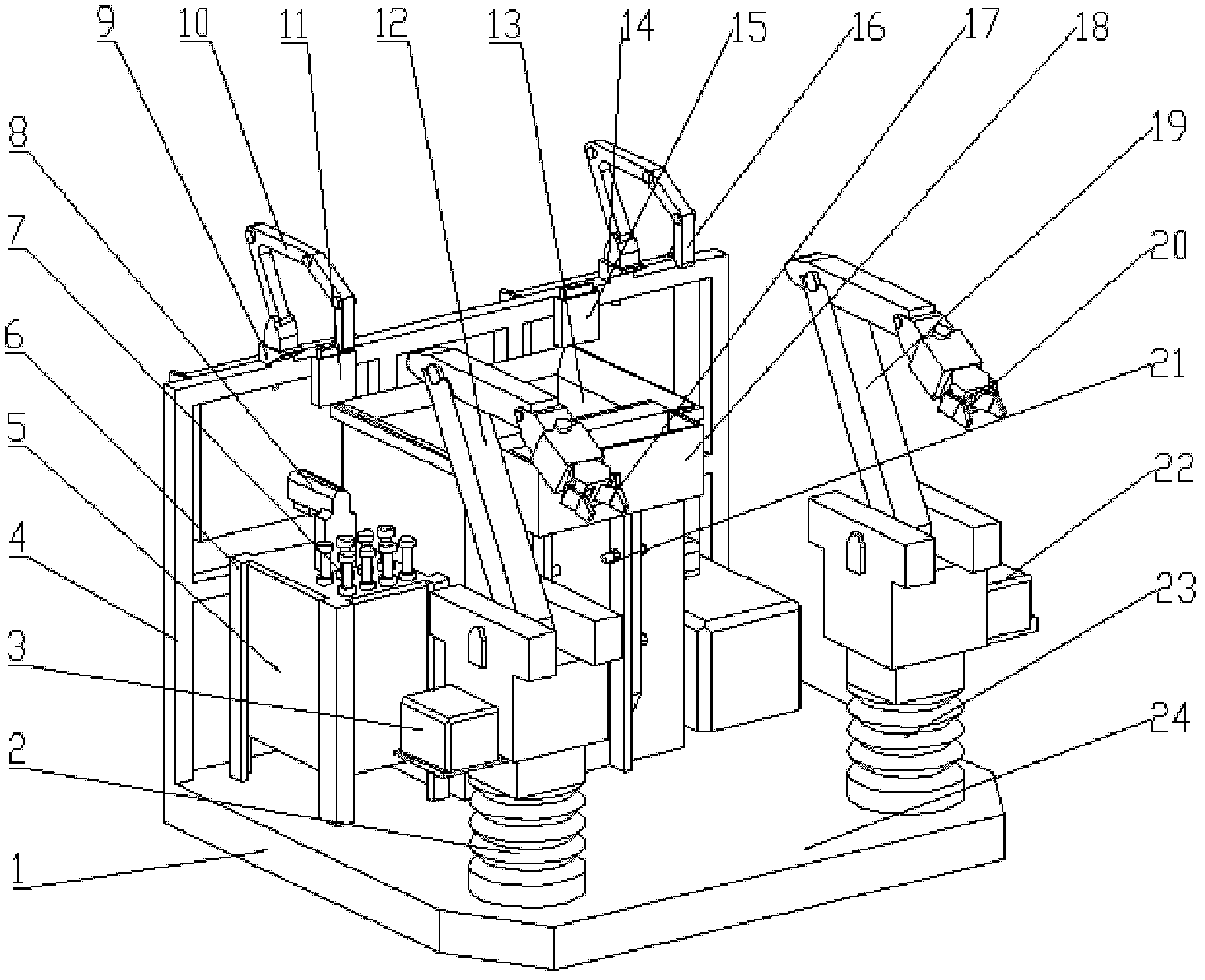
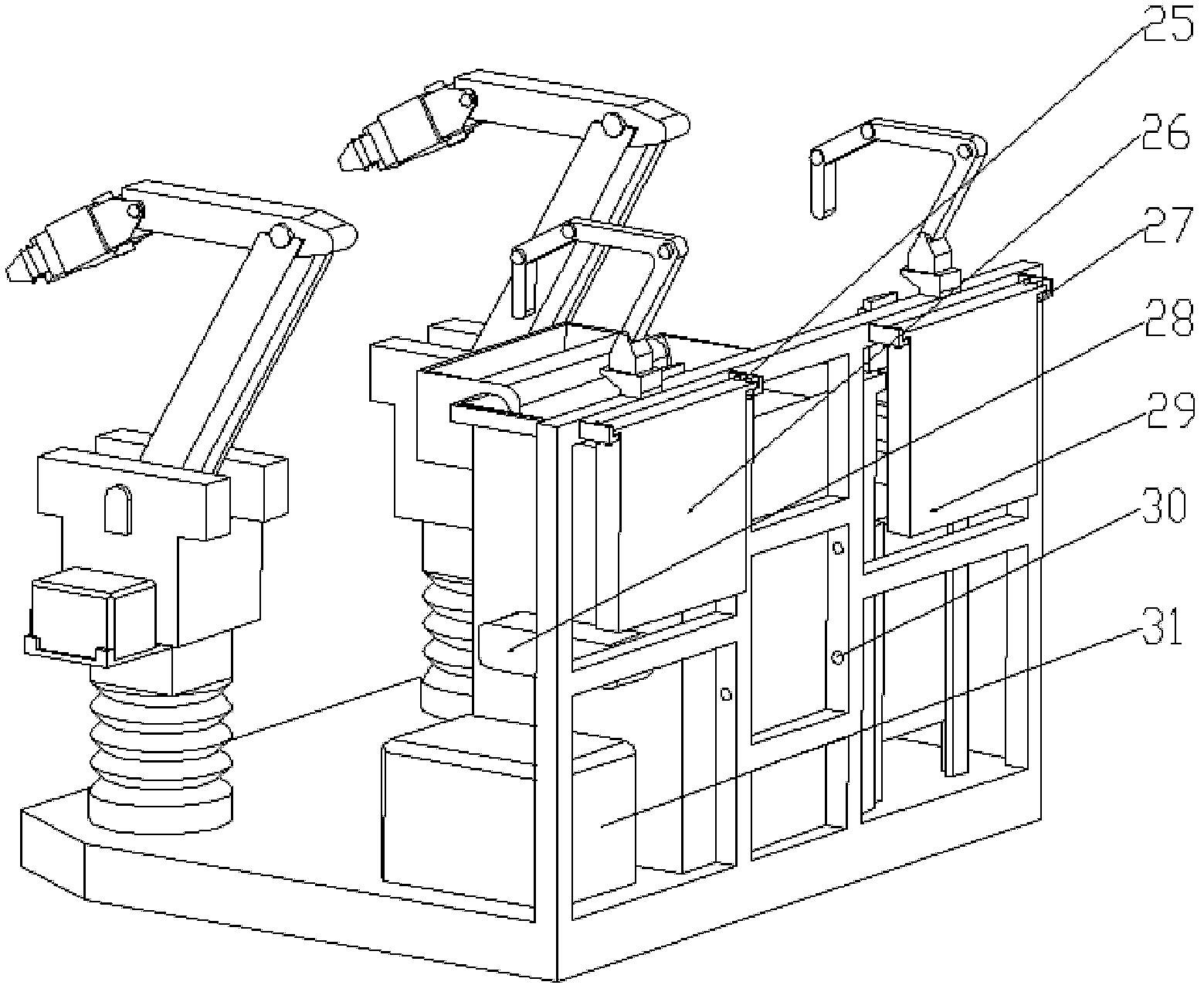
[0034] Such as Figure 1-Figure 3 As shown, the present invention is mainly composed of a robot operating platform support frame, a hydraulic lifting platform control integration 5, a robot operating system and an insulating bucket 13, and the robot operating platform support frame is respectively provided with a hydraulic lifting platform control integration 5, a robot operating system And the insulating bucket 13, the hydraulic lifting platform control integration 5 is connected with the robot operating system, and the hydraulic lifting platform control integration 5 and the robot operating system are all arranged outside the insulating bucket 13.
[0035] Among them, the support frame of the robot work platform is composed of the robot work platform chassis 1 and the robot work platform side connecting frame 4 to form an L-shaped structure. The rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More