

Method for positioning binocular non-calibrated space
A spatial positioning and non-calibration technology, applied in image data processing, instrumentation, computing, etc., to achieve accurate positioning, simple equipment deployment and debugging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
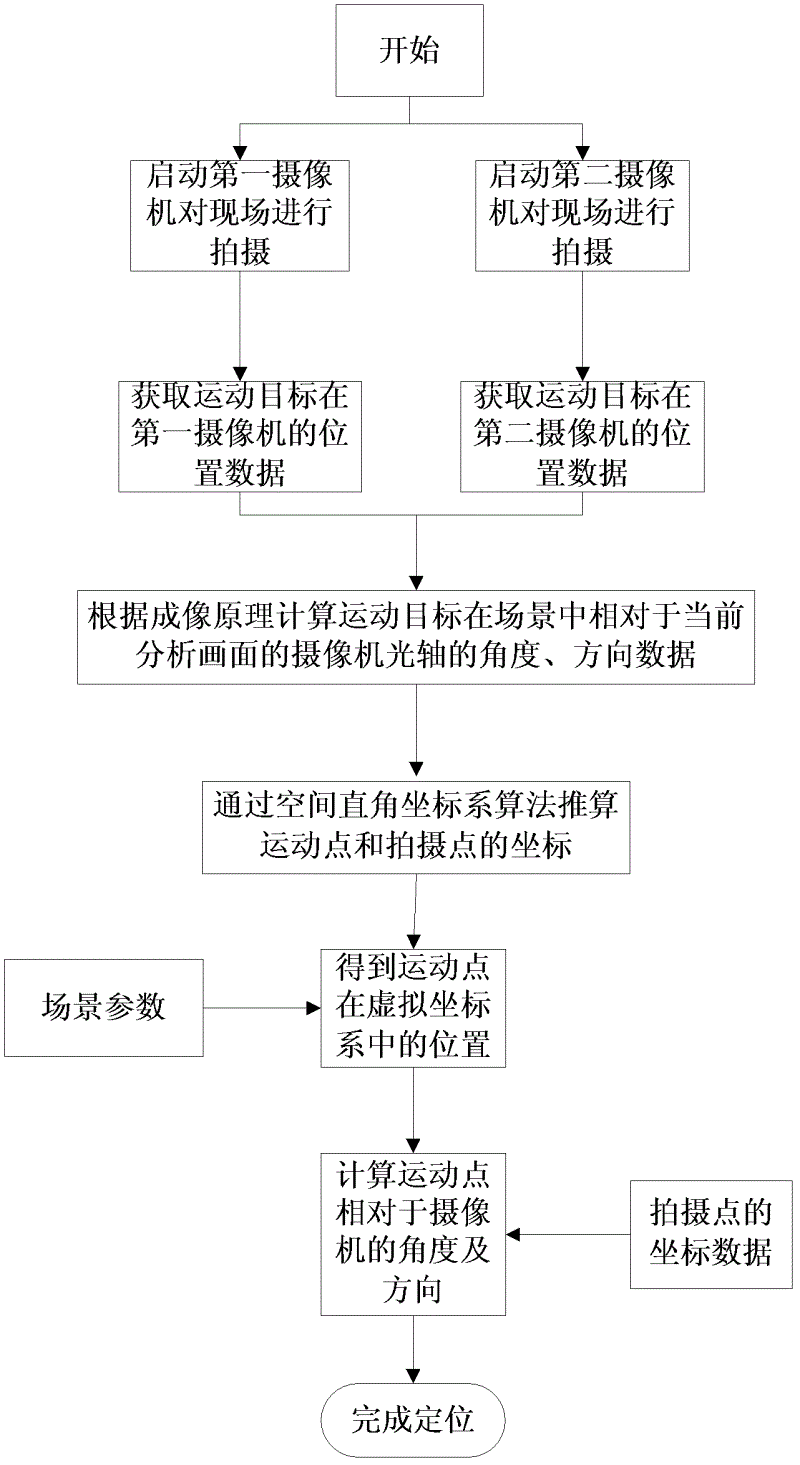
[0019] Such as figure 1 As shown, the binocular non-calibration space positioning method of the present invention includes the following steps:
[0020] The first step is to start the first camera and the second camera, and obtain the position data of the center point of the moving target in the first camera and the second camera respectively. The position data of the center point of the moving target at the first camera and the second camera are obtained by background difference method.
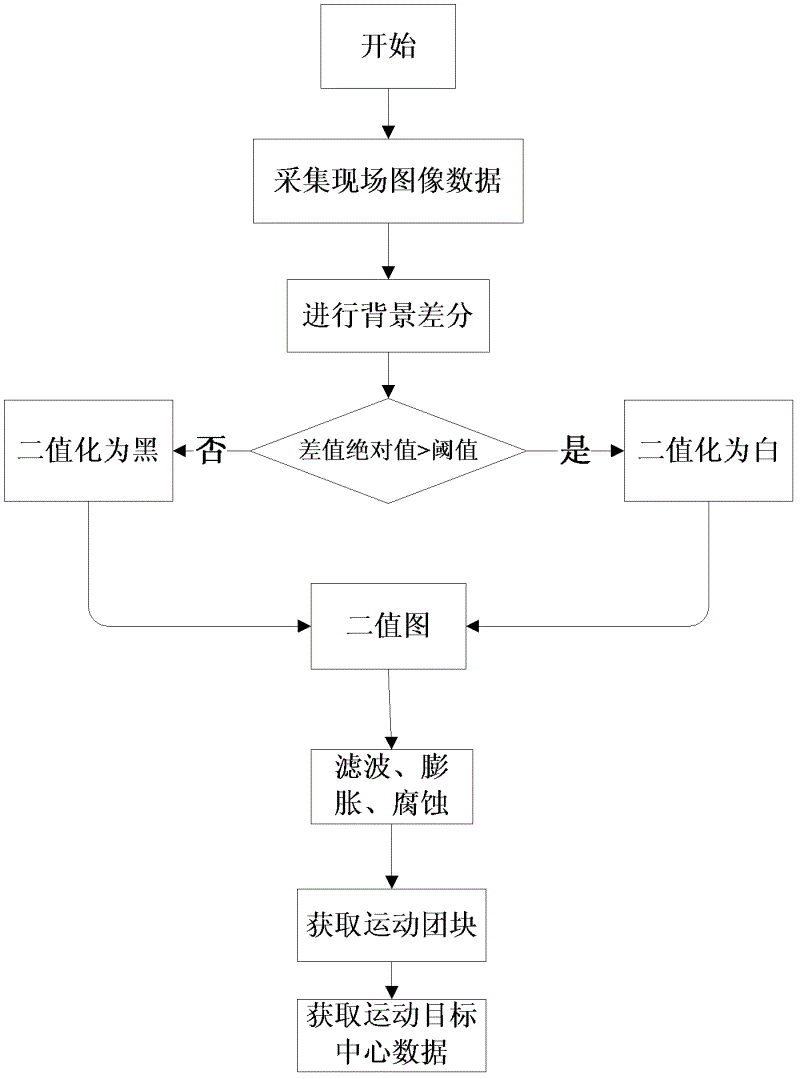
[0021] Such as figure 2 As shown, the acquisition of the position data of the center point of the moving target includes the following steps: The background subtraction method is a method to obtain the contour of the moving target by performing a differential operation on the frames in the video image sequence, which can be well applied to the presence of multiple The condition of the moving target. When there is movement of objects in the monitoring scene, there will be obvious differen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More