

Completely independent relative inertial navigation method
A technology of inertial navigation and navigation solution, applied in the field of inertial navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] A kind of completely autonomous relative inertial navigation method provided by the present invention is introduced below in conjunction with accompanying drawing and embodiment:
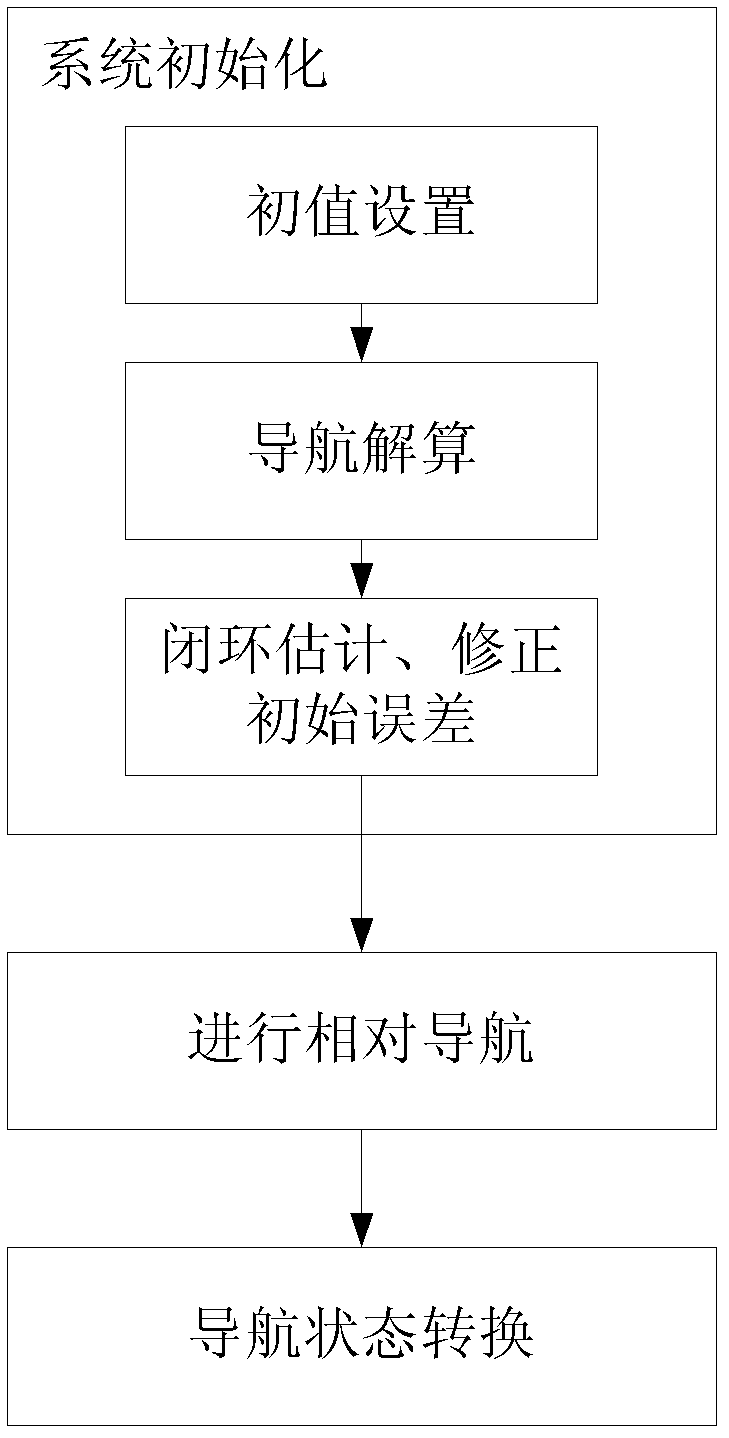
[0049] (S1) System initialization
[0050] This step is mainly used to establish the initial reference direction and position for relative navigation when the carrier is stationary or moored; the specific steps are as follows:
[0051] (S1.1) Initial value setting:
[0052] Set the initial heading angle and attitude angle to 0°; because there is no accurate initial position information, set the initial latitude and longitude to 0°.
[0053] (S1.2) Navigation solution:
[0054] The angular velocity and specific force output by the gyroscope and the accelerometer are used to calculate the navigation parameters by using the existing navigation solution method.
[0055](S1.3) Estimate and correct the initial error:
[0056] The closed-loop Kalman filter is used, the formula (1) is used as the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More