

High-speed six-degree of freedom parallel manipulator
A technology with a degree of freedom and a manipulator, applied in the field of robotics, can solve the problems of affecting the dynamic performance of the mechanism, increasing the mass and inertia of moving parts, and difficult to achieve high-speed motion, etc., to achieve the effect of uniform force, good dynamic performance and symmetrical structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in combination with specific embodiments.
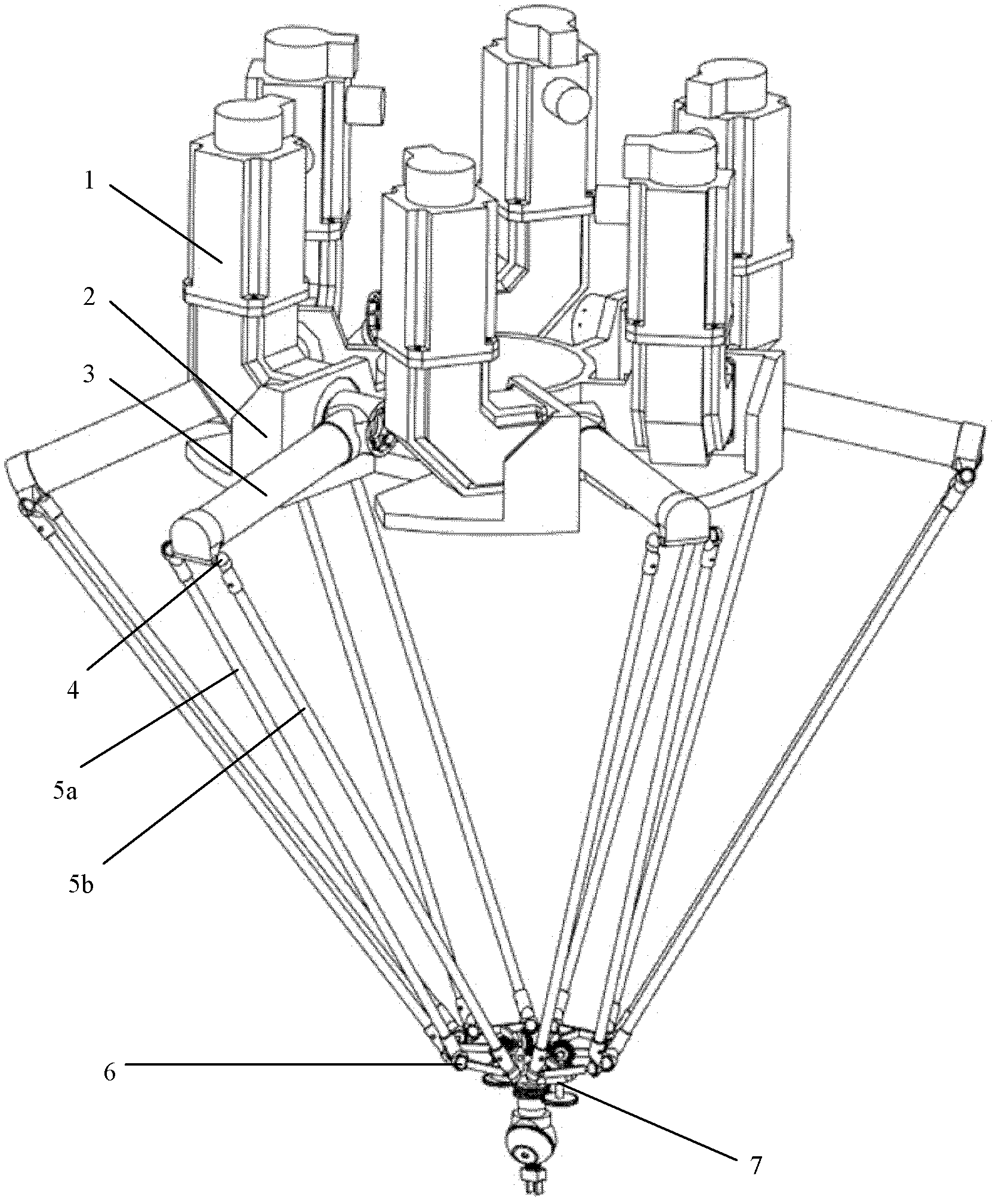
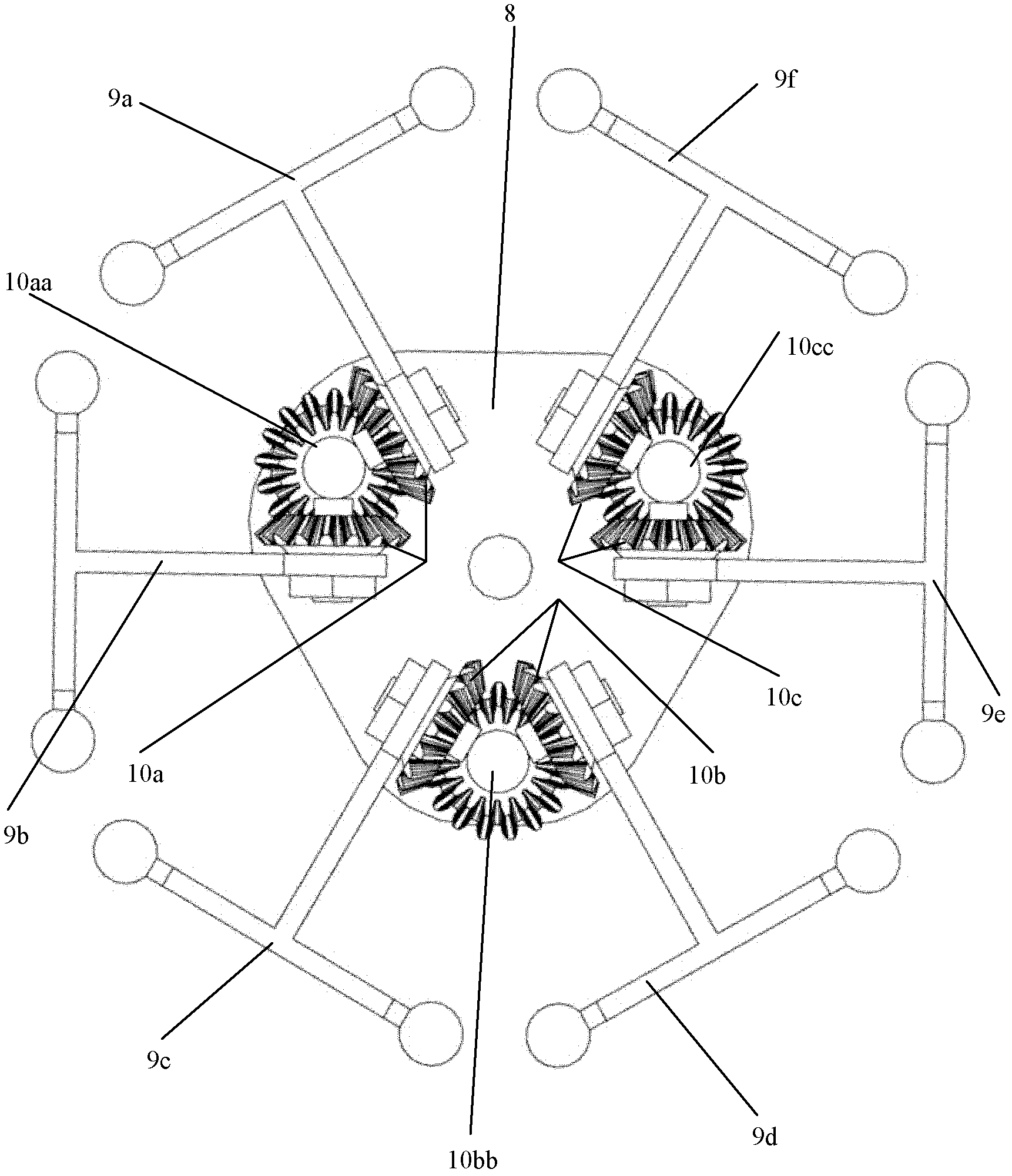
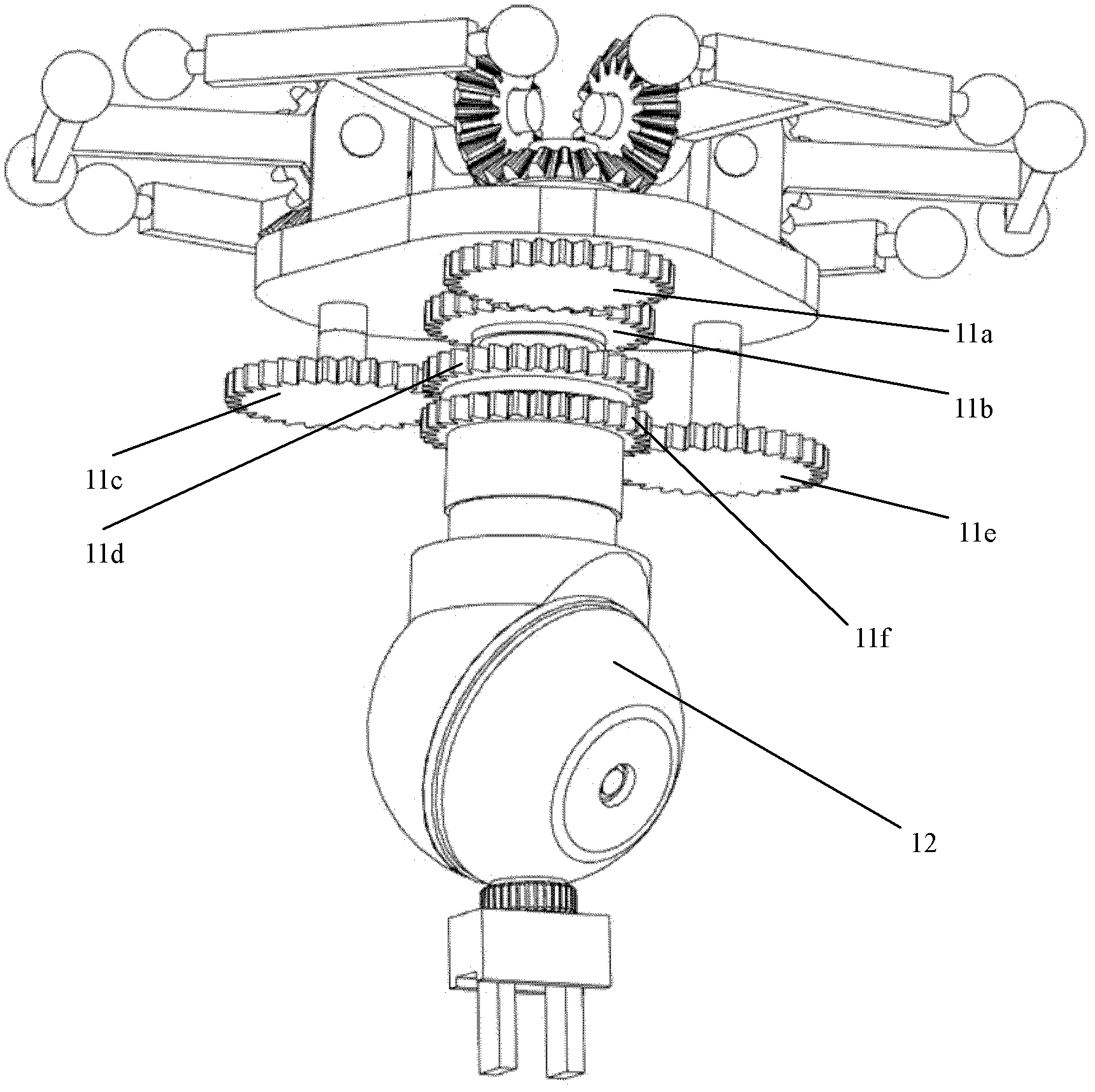
[0017] Such as figure 1 As shown, a high-speed six-degree-of-freedom parallel manipulator of the present invention includes a fixed frame 2, a moving platform 7, a three-degree-of-freedom wrist 12, and six motion branch chains with the same structure arranged between the fixed frame 2 and the moving platform 7 ; The fixed frame 2 is fixedly connected with six driving devices 1 . Each kinematic branch chain comprises a near frame rod 3, two parallel and equal long far frame rods 5a, 5b, one end of the near frame rod 3 is affixed to the output end of a driving device 1, and the near frame rod 3 The other end of the upper connecting shaft 4 is fixedly connected; the driving device 1 provides a degree of freedom of rotation or movement for the near frame rod 3; The upper connecting shaft 4 in the chain is ball-hinged, and the other ends of the 5a and 5b of the two d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More