

End effector of multi-melon-fruit picking robot
A technology for picking robots and end effectors, which is applied in the direction of picking machines, manipulators, harvesters, etc., can solve the problems of poor versatility and single target of end effectors, and achieve the effect of reducing weight and simplifying difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The specific embodiments of the present invention will be further described below according to the accompanying drawings.
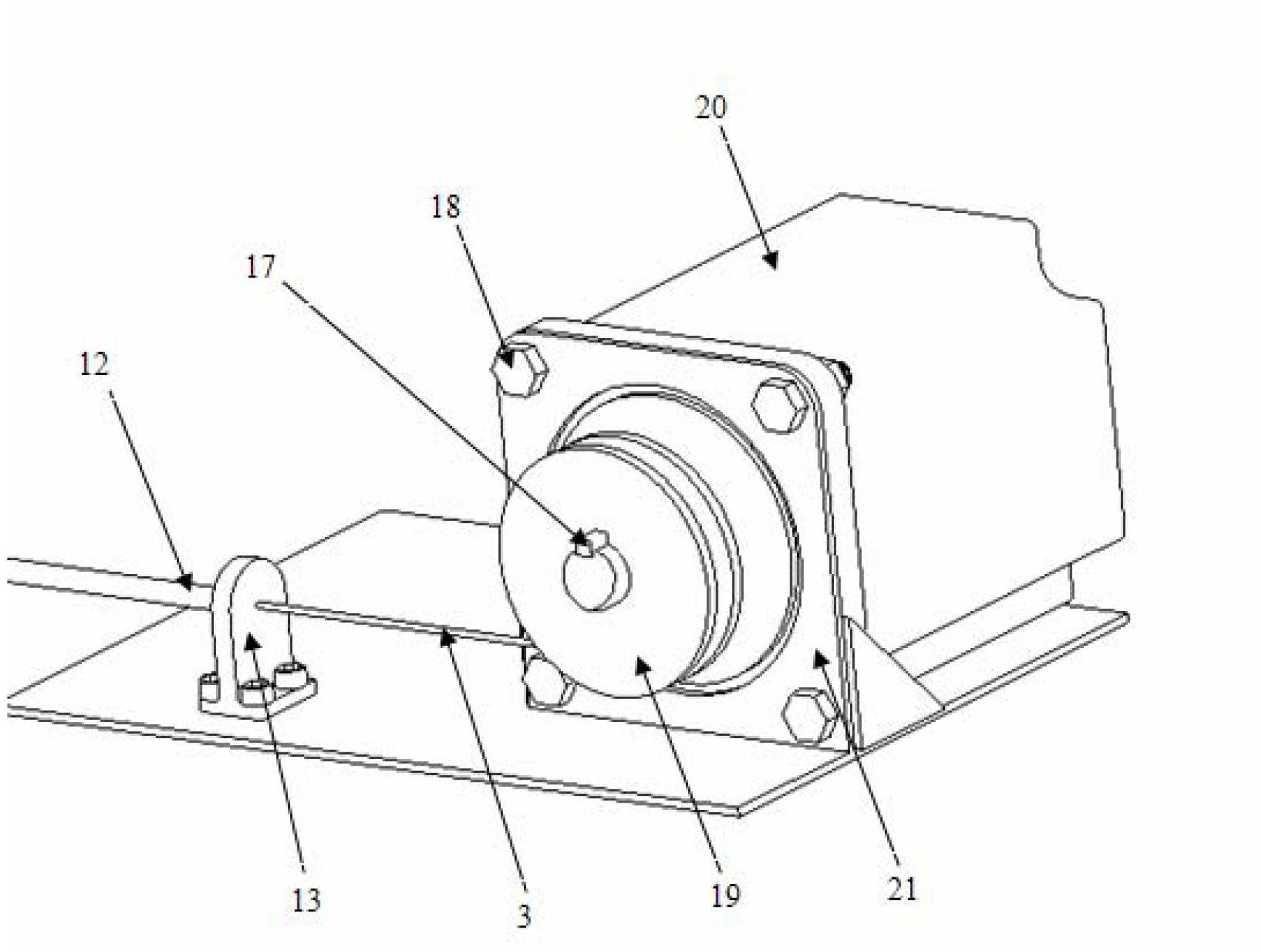
[0045] The end effector of a multi-melon fruit picking robot of the present invention is composed of an execution end and a driving end.
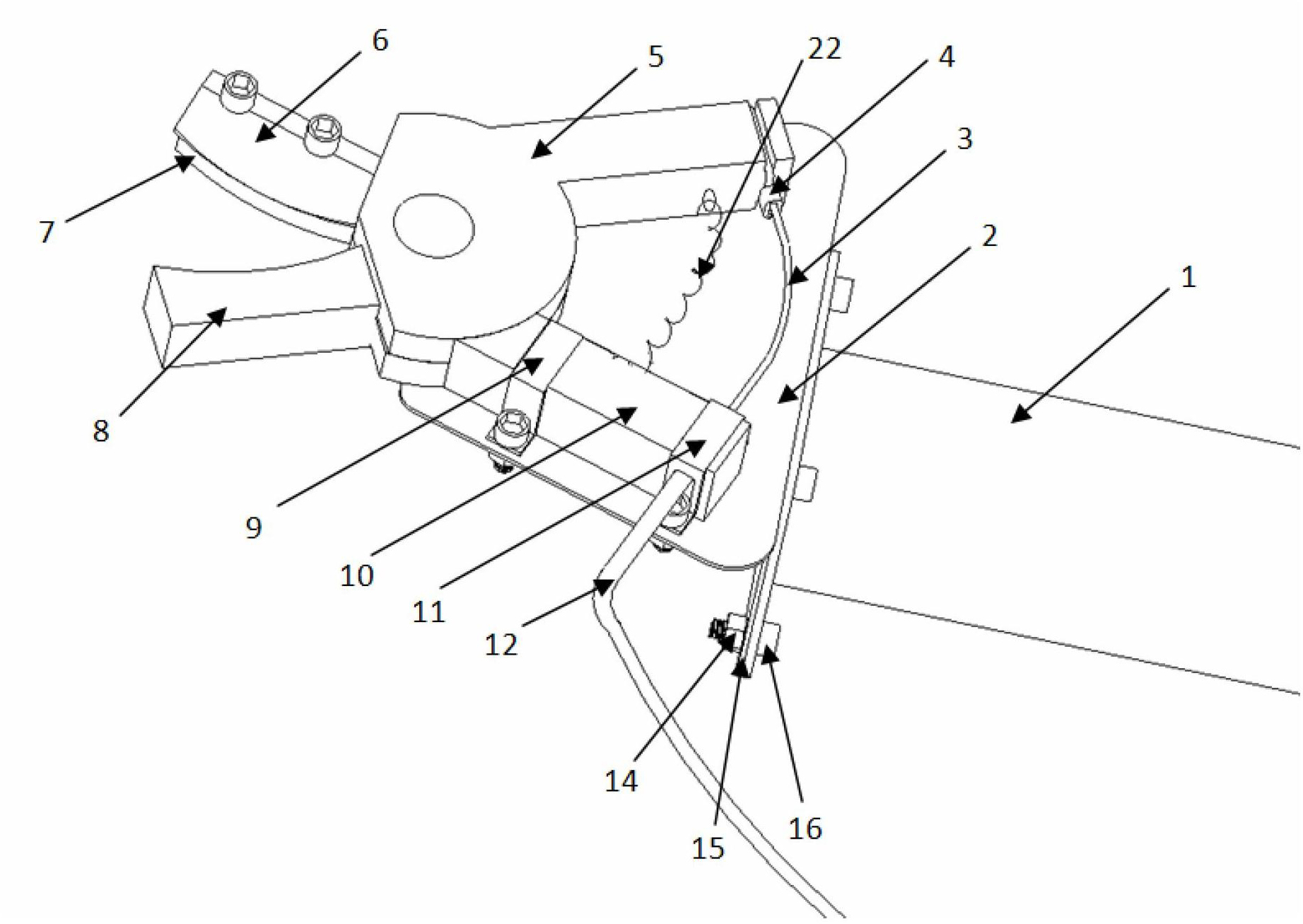
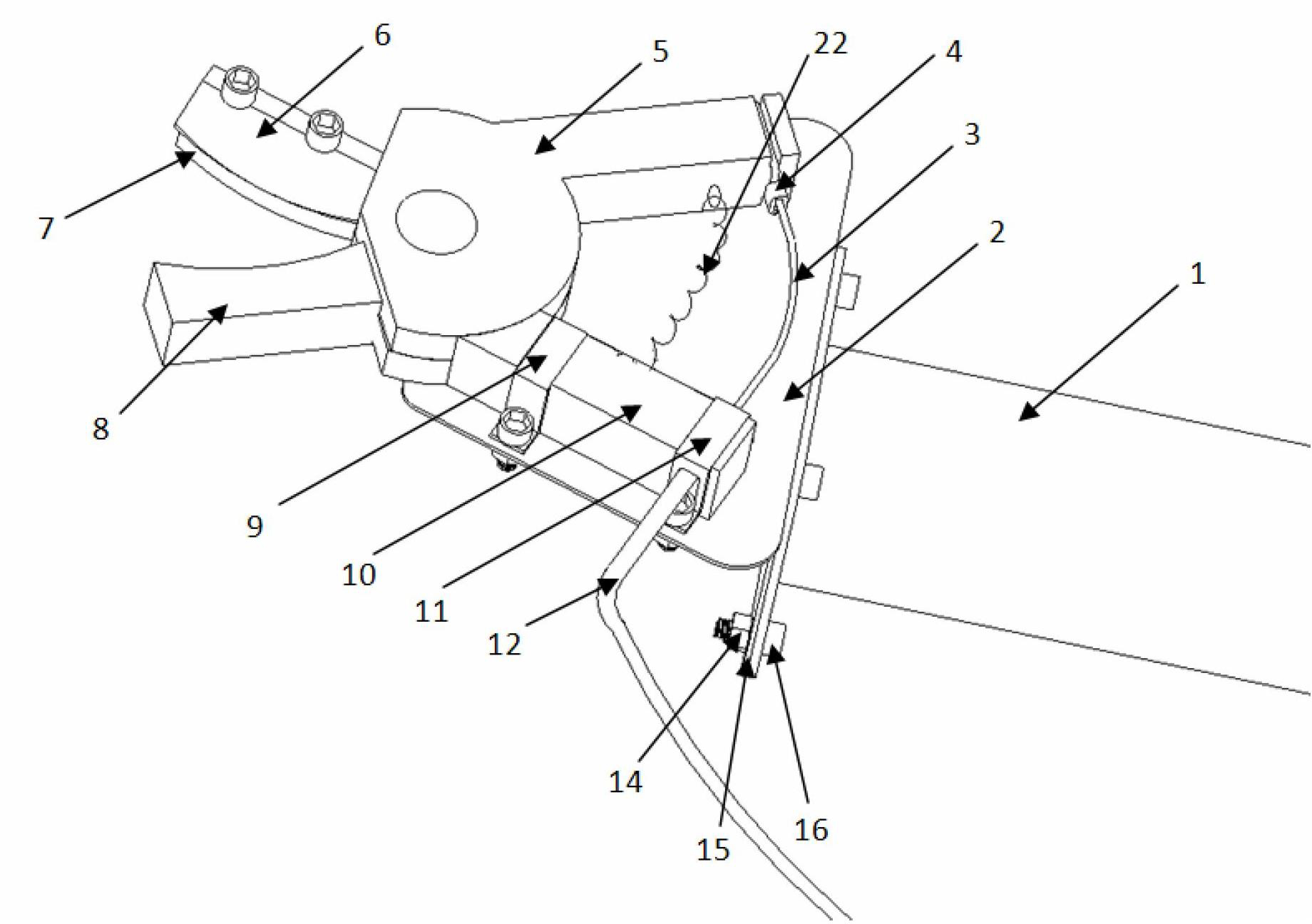
[0046] Such as figure 1 As shown, it is a schematic diagram of the execution end of the end effector of the present invention, the execution end includes a shear fixed end 10 and a shear movable end 5, and the shear fixed end 10 and the shear movable end 5 are pin-connected in the middle to form a A hinge that can rotate relative to each other, in the shape of scissors.
[0047] Wherein, the head of the shearing movement end 5 is arranged with a shearing movement end stopper 8, and the shearing movement end stopper 8 is on the inside of the scissors shape, facing the direction of the clamping block 7 and the shearing fixed end blade 6. concave arc. A groove is formed on the tail end of the shearing movement e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More