

Experimental control structure of unmanned surface vessel
A control structure, unmanned ship technology, applied in two-dimensional position/channel control and other directions, can solve problems such as difficult to modify motion control algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Describe the present invention below in conjunction with embodiment:
[0016] The unmanned surface vehicle carrier itself can be designed and manufactured according to different navigation control experiment requirements or an existing model can be selected. In the embodiment, a single yacht model manufactured by Henan Xinzhou Yachting Company is used.
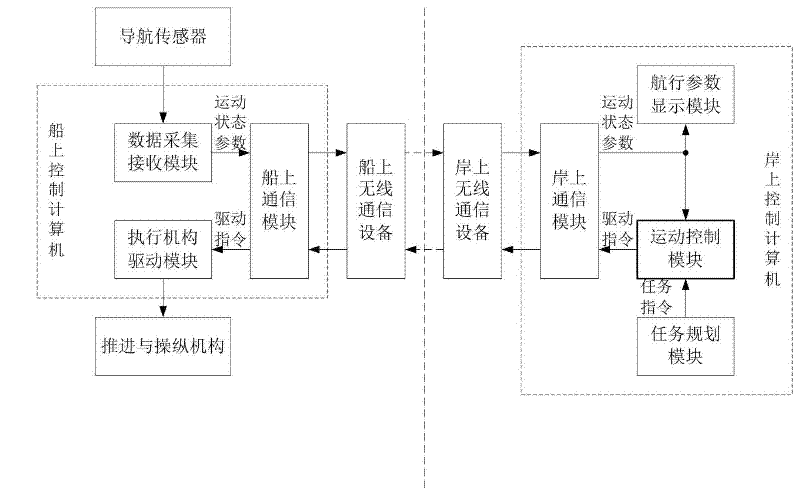
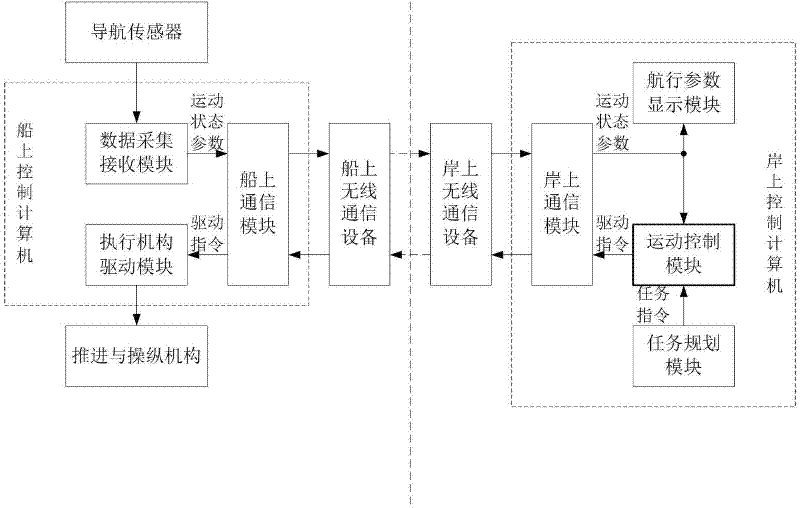
[0017] The control structure of the experimental unmanned ship includes on-shore modules, on-board modules, navigation sensors, and hull propulsion and manipulation mechanisms. The shore module includes a shore communication module, a navigation parameter display module, a motion control module and a mission planning module; the ship module includes a ship communication module, a data acquisition and receiving module, and an actuator drive module.
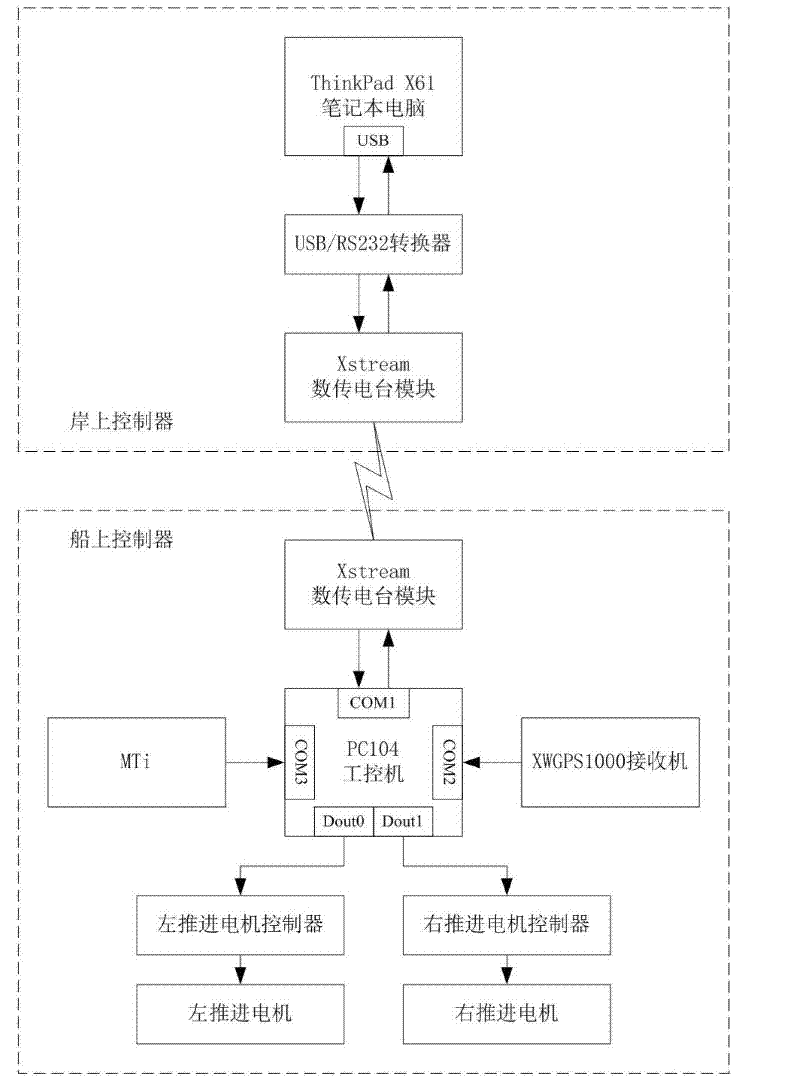
[0018] The control computer of the shore module adopts Lenovo ThinkPad X61 notebook computer, the communication module adopts the XStream data transmission radio module of A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More