

Multipoint contact force sense feedback system orienting virtual reality dental department operation training
A multi-point contact and feedback system technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as unreal interaction force and visual penetration phenomenon, so as to eliminate visual nesting errors and ensure authenticity The effect of sense and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail below in conjunction with the accompanying drawings.
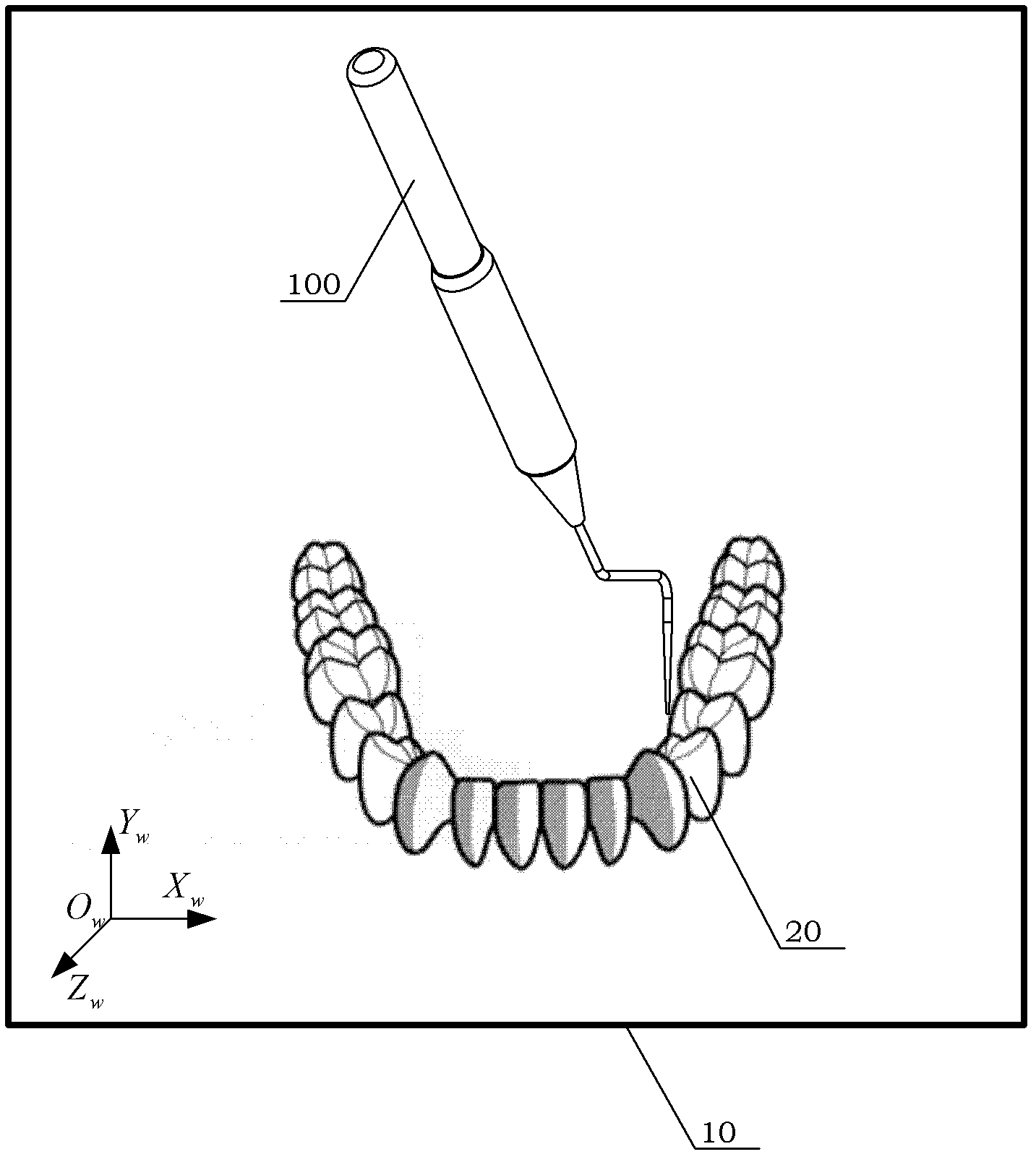
[0023] see figure 1 As shown, a virtual scene 10 of a virtual reality dental operation training system includes at least a virtual dentition 20 and a graphic tool 100 . Wherein the virtual dentition 20 comprises a virtual 3D tooth model 30 and a virtual 3D gingival model 40 (see Figure 1A shown). see Figure 4 As shown, in the coordinate transformation, the center of any ball in the virtual dentition 20 spherical tree is recorded as The radius is denoted as r o .
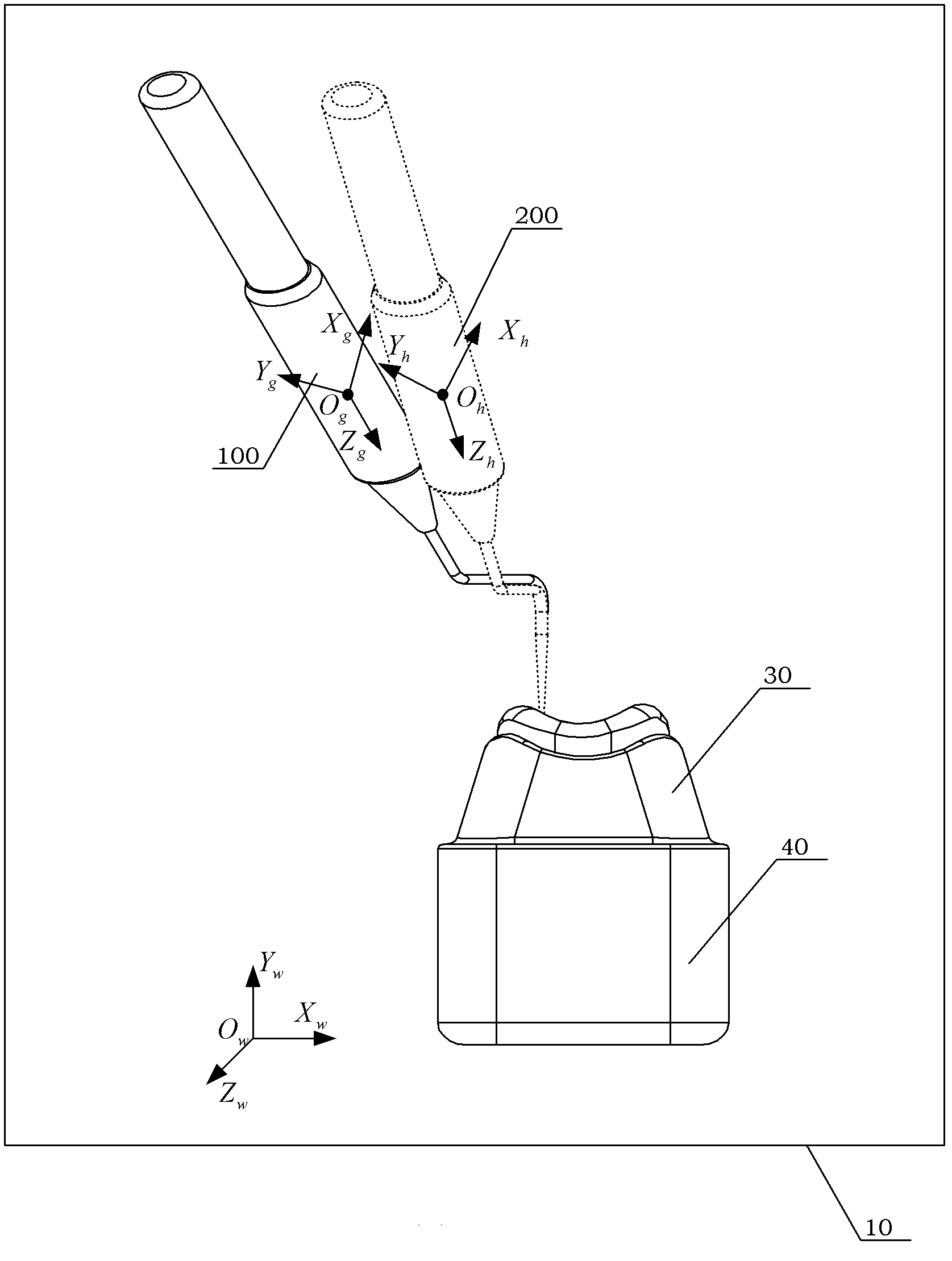
[0024] see Figure 1A As shown; in the collision detection stage, the operator uses the single 3D tooth model 30 to perform anti-collision processing and the whole oral cavity to perform dental operation training is the same means. The inventor virtualizes the surgical tool as a graphics tool 100 , and virtualizes the force feedback device as a force-sense tool 200 . In the figure, the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More