

A DNN neural network adaptive control method based on tendon-driven dexterous hand
An adaptive control and neural network technology, applied in the field of DNN neural network adaptive control based on tendon-driven dexterous hands, can solve problems such as difficulty in obtaining control effects, and achieve the effects of enhanced ability, high control precision, and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to enable those skilled in the art to better understand the solutions of the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
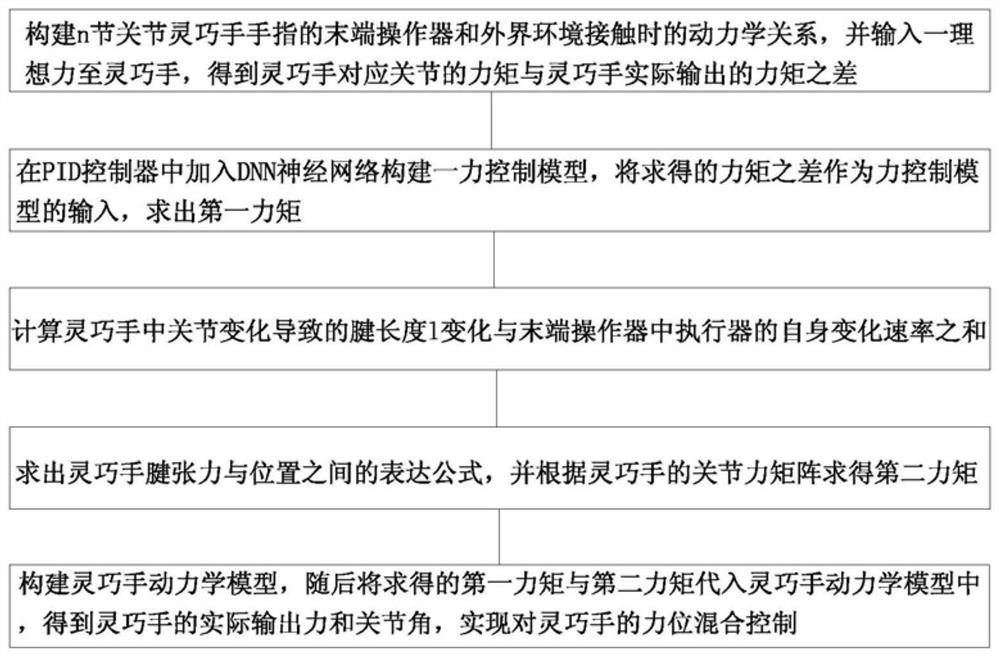
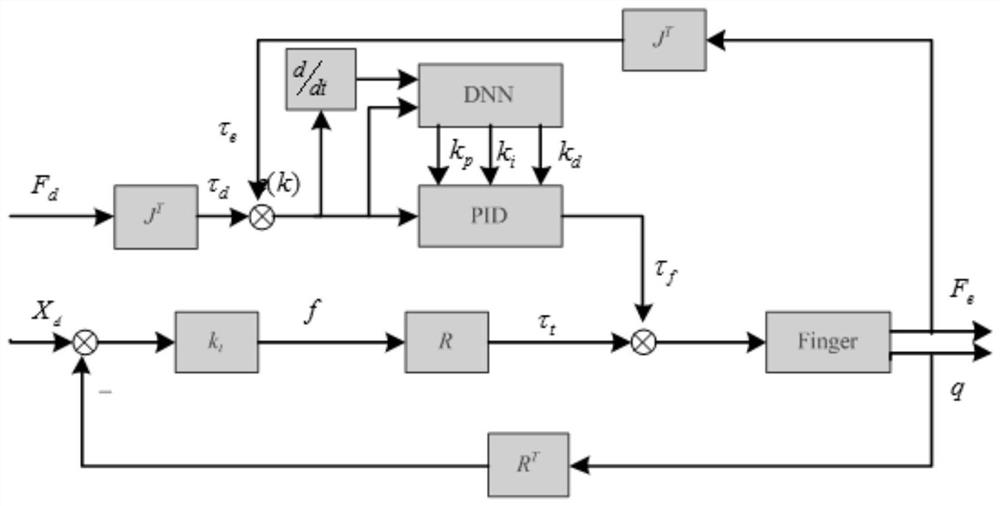
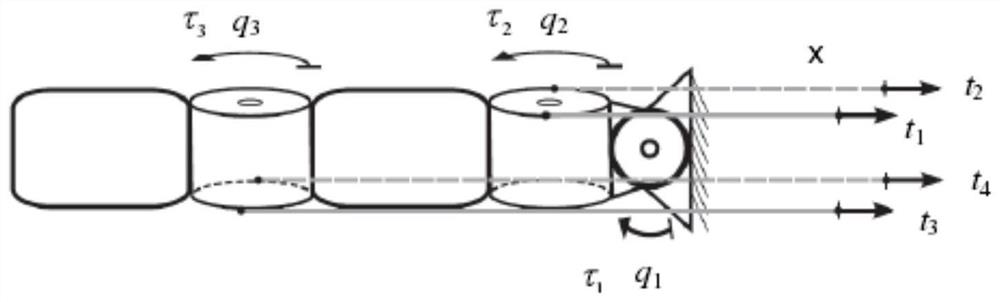
[0024] refer to figure 1 , in an embodiment of the present invention, a DNN neural network adaptive control method based on tendon-driven dexterous hand is provided, which is applied to robot control, and the method includes the steps of: first, constructing an end effector for n-joint dexterous hand fingers Kinetic relationship when in contact with the external environment In the formula, is the joint angle vector, angular velocity vector and angular acceleration vector of the dexterous finger, M(q)∈R n×n is the positive definite inertia matrix of the dexterous hand; is the centrifugal force and Coriolis force vector; τ∈R n×1 Enter the force or moment vector for the j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More