

Control method for bionic dual-feet robot walking on water
A water walking and control method technology, applied in the field of bionics, can solve the problems of low effectiveness of gait planning, high water surface interference intensity, inapplicability, etc., to avoid dynamic modeling, enhance real-time performance, and overcome large-scale problems. perturbation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the object, technical solution and advantages of the present invention clearer, the control method of the bionic biped water walking robot of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0017] 1. CPG-fuzzy joint control system of bionic biped water walking robot
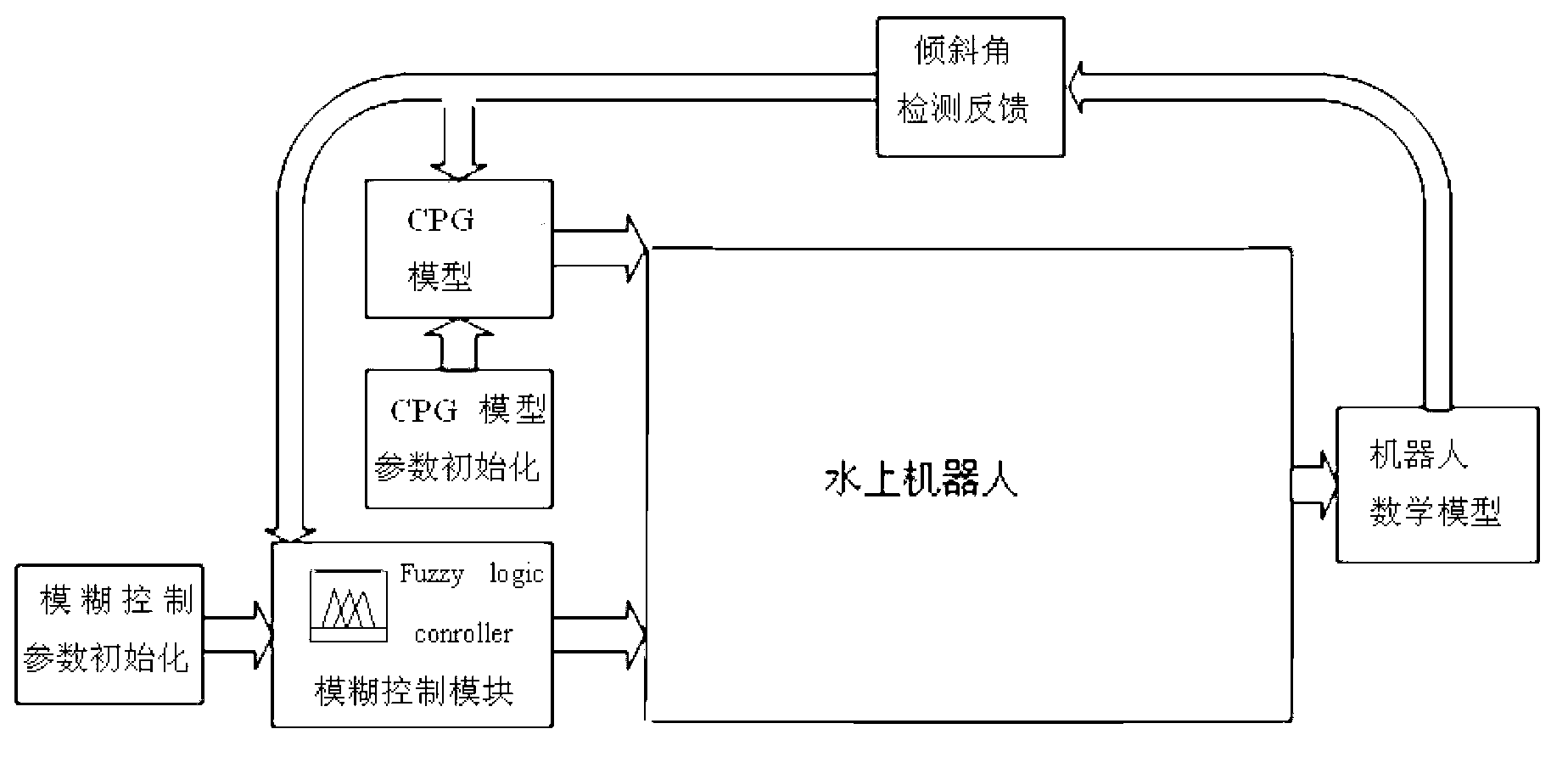
[0018] figure 1 A schematic diagram of the control structure of the bionic biped water walking robot according to the method of the present invention is given, including the mechanical structure of the biped water walking robot, the robot mathematical model, the CPG model parameter initialization, the CPG model, the fuzzy control parameter initialization, the fuzzy control module and the inclination angle detection feedback module. The mathematical model of the biped water walking robot is a nonlinear model obtained by co-simulation of the electromechanical system. The joints of the two legs of the water walking robot are controlle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More