Actively vibration damping method and device based on controllable local degree of freedom
A technology of active vibration reduction and vibration reduction device, which is applied in manipulators, manufacturing tools, etc., can solve the problems of complex dynamic behavior of flexible manipulators and slow progress in dynamic performance optimization research.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0105] The present invention will be described in detail below in conjunction with the accompanying drawings and examples.
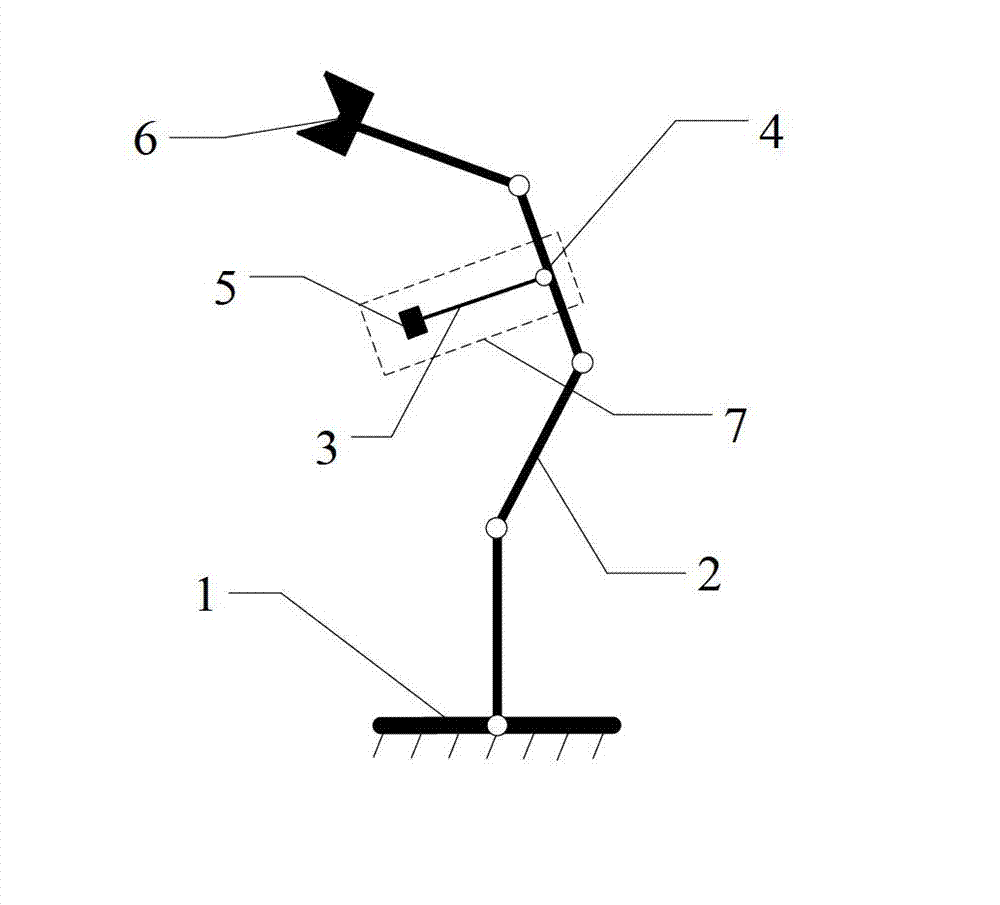
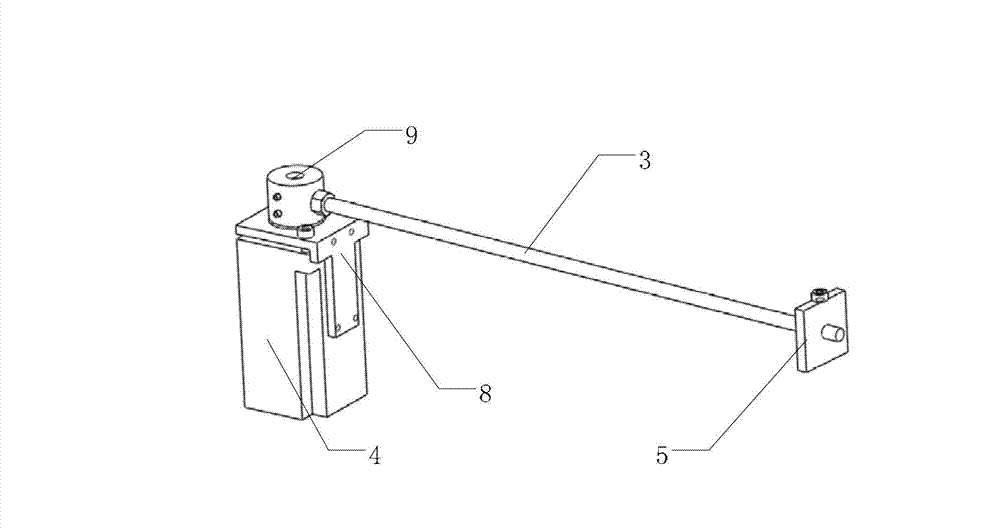
[0106] See figure 1 , the present invention is an active damping device based on controllable local degrees of freedom. The damping device 7 is composed of a servo motor 4, a rigid strut 3, and an end mass 5 with adjustable position and mass. The vibration damping device 7 is installed on the flexible mechanical arm 2 of the flexible robot to reduce the vibration of the end effector 6 of the flexible robot. The position connection relationship between them is: the flexible mechanical arm 2 is connected in series by joints. One end of the rigid strut 3 is connected to the output shaft of the servo motor 4 through the hub 9, and the other end is fixedly connected to the end mass 5, and the entire vibration damping device is connected to the flexible mechanical arm 2 through the clamp 8, such as figure 2 shown.
[0107] The flexible manipulator 2 is a s...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap