

Robot whole-situation path planning method facing uncertain environment of mixed terrain and region
A global path planning and robot technology, applied in two-dimensional position/channel control and other directions, can solve problems such as path infeasibility, obstacle transition avoidance, consumption, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0095] Embodiment 1: A global path planning method for robots facing uncertain environments in mixed terrain areas, the specific steps are as follows:
[0096] Step 1: Detect and determine the working environment information of the robot;
[0097] According to the diameter of the robot structure and its motion shape, it is treated as a mass point with a certain size, and the maximum moving step is St. ; Determine the coordinates of the robot's starting point and target point according to the requirements of the task; use the perception system to detect and determine various obstacles in the robot's movement environment; use the perception system to detect the topographic features of different areas;
[0098] Step 2: Model the working environment of the robot according to the above environmental information and the motion step of the mobile robot, and finally form a robot path represented by a finite point sequence;
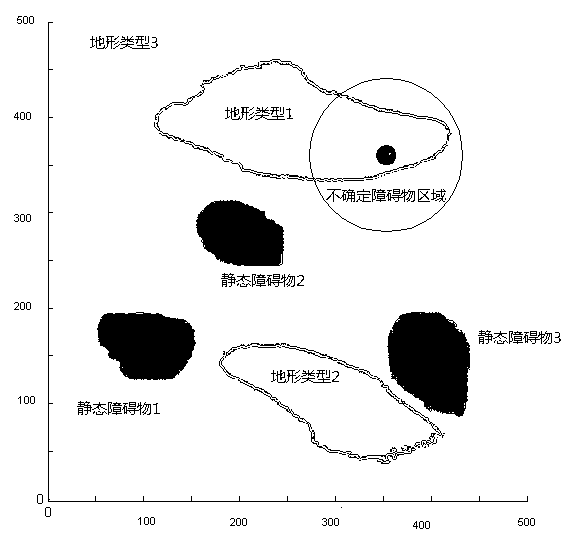
[0099] (2.1) If figure 1 As shown, in the global coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More