

Fluid-driven self-adaption pipeline crawler
A pipeline crawler, fluid-driven technology, applied in the direction of pipe components, pipes/pipe joints/pipe fittings, mechanical equipment, etc., can solve the problems of limited walking distance, complicated design and manufacture of robot walking mechanism, unstable walking speed, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] a. Driving process
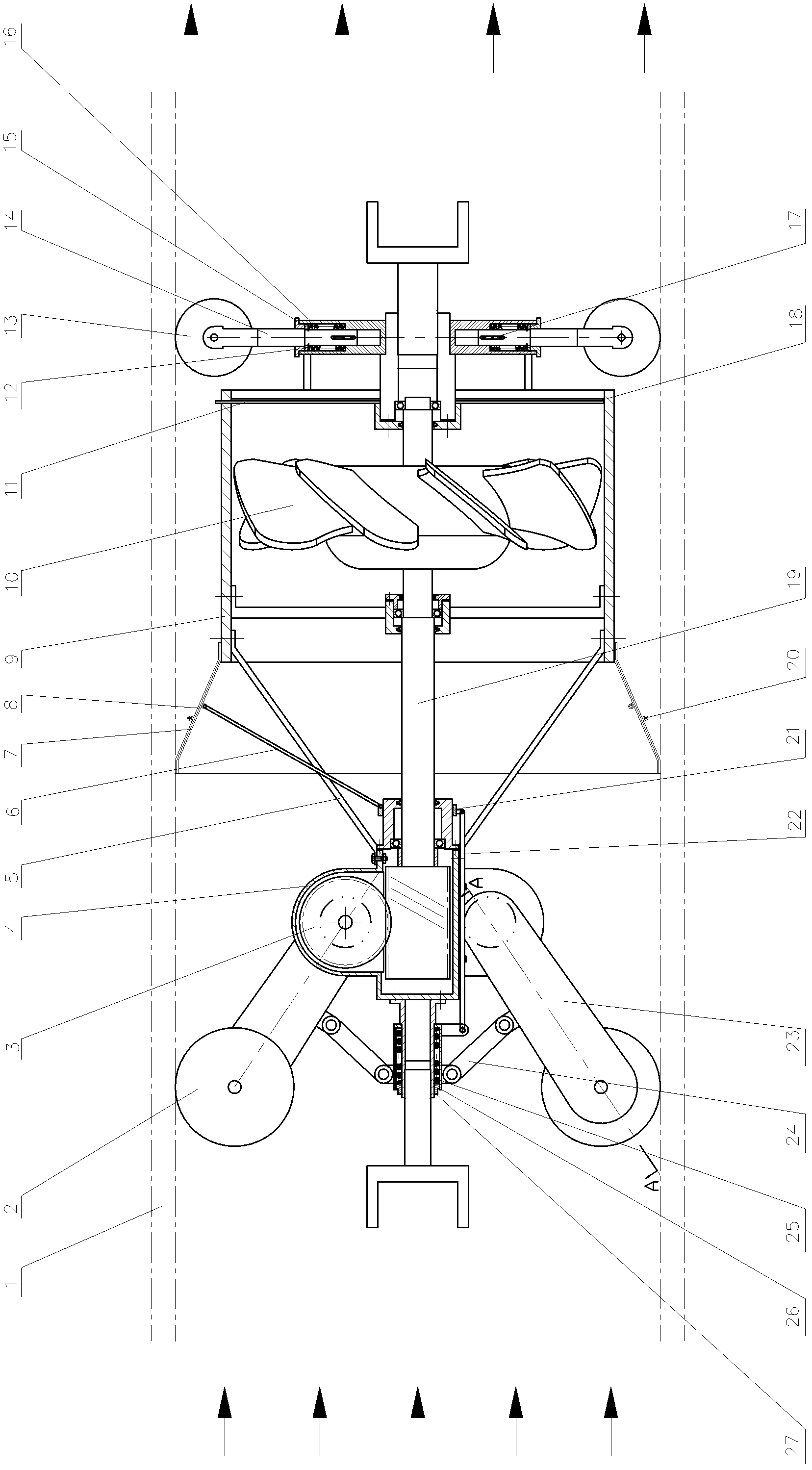
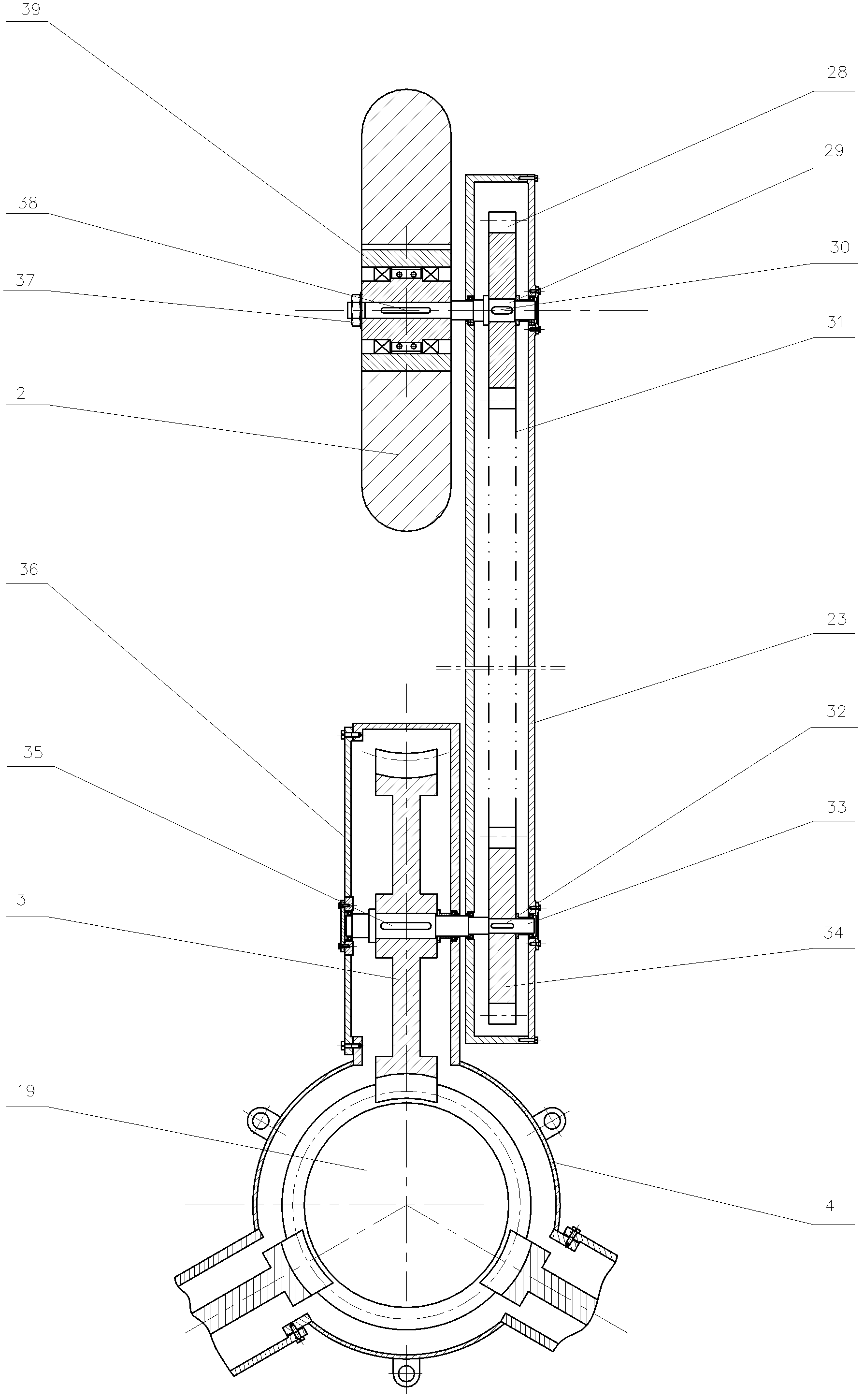
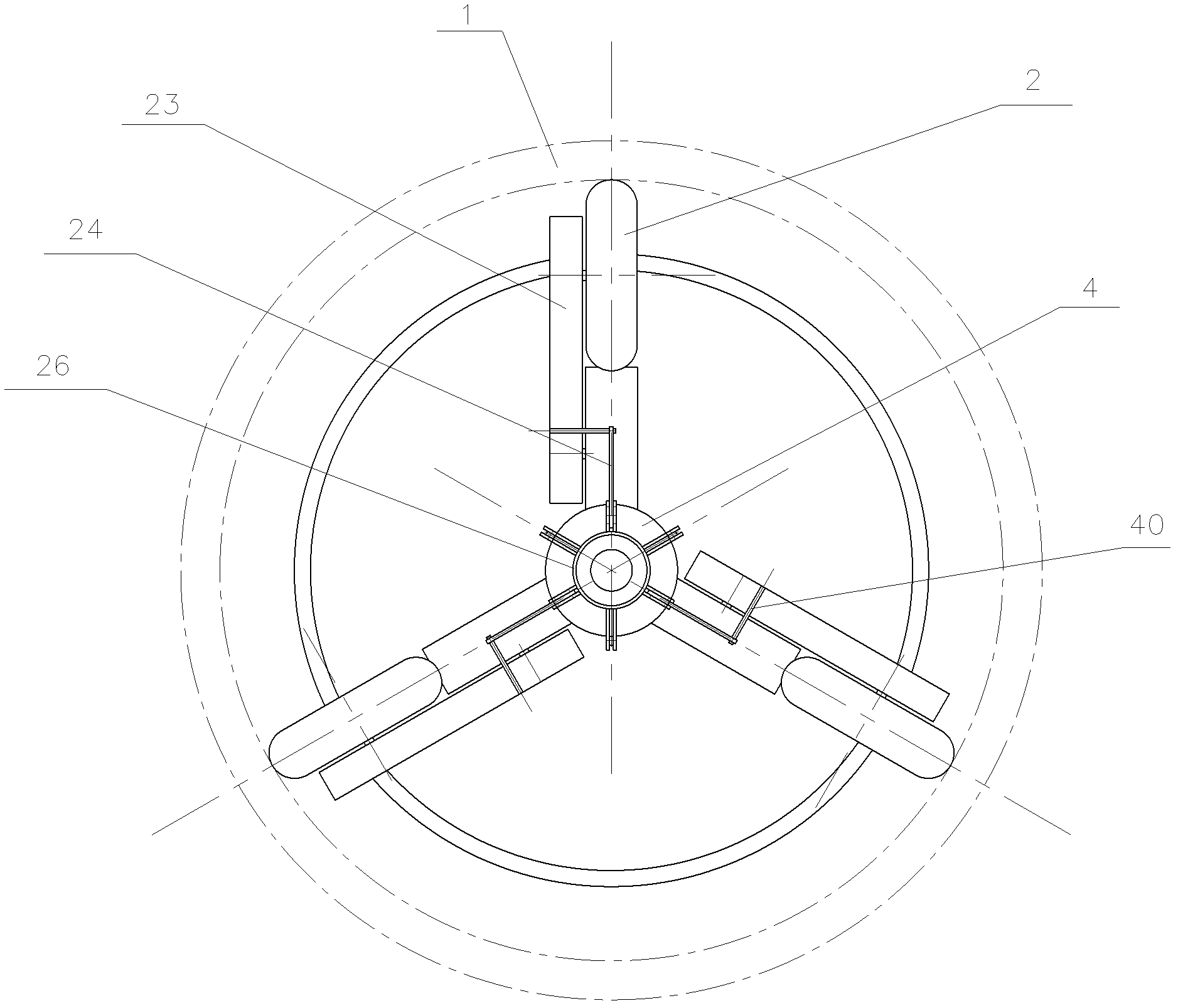
[0024] refer to Figure 1~3 , under the working condition of the crawler in the fluid conveying pipeline, the fluid flows in the direction shown by the arrow in the figure. The fluid flows to the umbrella-shaped hydrofoil [8][7], changes direction and enters the guide tube [9], and the impeller [10] is installed in the guide tube, and the fluid flows to push the impeller [10] to rotate, and the impeller and the power shaft [19] is fixedly connected to make the power shaft rotate, and the rear end of the power shaft [19] is a worm, which rotates and drives three turbines [3] meshing with it to rotate, and the turbine drives the coaxial driving pulley [34] ] rotates, the driving pulley [34] transmits power to the driven pulley [28] by the synchronous belt [31], and transmits the power to the driving wheel [2] by the rotating shaft.
[0025] When the fluid flow speed increases, the fluid pressure difference on both sides of the crawler increases, whic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More