

Gaussian Jordan inversion method based on multi-core dsp for all selected pivots of parallel matrices
A technology of selecting all pivot elements and inverse methods, applied in the field of mobile communication, can solve the problems that cannot meet the requirements of high-speed operation, and the algorithm for finding the inverse matrix cannot satisfy all matrices, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
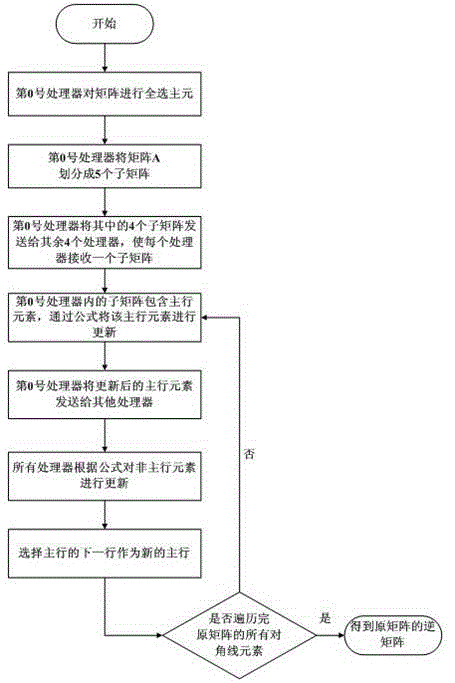
[0042] Such as figure 1 The parallel matrix inversion algorithm based on multi-core DSP is shown, which is Gaussian Jordan algorithm with all selected pivots, which occupies less memory, has fast operation speed and high precision, and is easy to implement in parallel.
[0043] Each update of the Gaussian Jordan inversion algorithm matrix element is based on the elements on the diagonal, and the elements are updated with different formulas for the elements in different columns, in the same column and different rows, and in different columns and rows. The row where the current diagonal element is located in each update is called the main row, each matrix element on the main row is called the main row element, and the rest of the matrix elements are called non-main row elements.
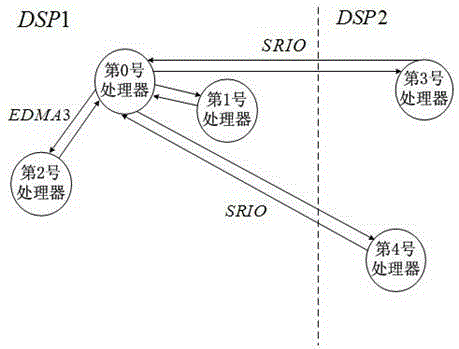
[0044] Such as figure 1 , 2 As shown, in this embodiment, j=5 block processors are used to invert the matrix A of order n, and the processors are numbered from 0 to 4. Among them, the digital signal...
Embodiment 2
[0065] The difference from Example 1 is that steps 3-5 are different.
[0066] The specific implementation of steps 3 to 5 in this embodiment is as follows:
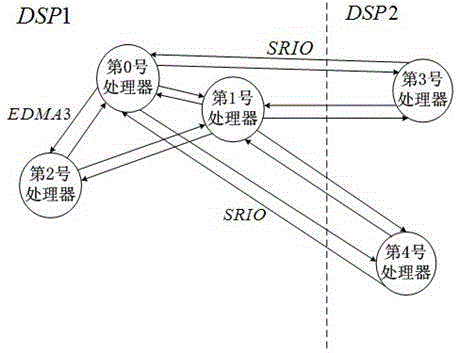
[0067] Step 3: The processor with the main row in the sub-matrix is the No. 1 processor, so the No. 1 processor uses the formula:
[0068] α kk = 1 / α kk *
[0069] and the formula:
[0070] α kj = α kj * × α kk
[0071] Update the main row elements, and use EDMA3 to send the updated main row elements to No. 2 processor, and use SRIO to send the updated main row elements to No. 3 and No. 4 processors, where the formula where α* is the element value in the sub-matrix, α is the element value in the sub-matrix after updating, n is the number of sub-matr...
Embodiment 3
[0080] The difference from Example 1 is that steps 3-5 are different.
[0081] The specific implementation of steps 3 to 5 in this embodiment is as follows:
[0082] Step 3: The processor with the main row in the sub-matrix is the No. 2 processor, so the No. 2 processor uses the formula:
[0083] α kk = 1 / α kk *
[0084] and the formula:
[0085] α kj = α kj * × α kk
[0086] Update the main row elements, and use EDMA3 to send the updated main row elements to No. 1 processor, and use SRIO to send the updated main row elements to No. 3 processors and No. 4 processors.
[0087] Step 4: After receiving the updated value of the main row element, the rest of the processors use the formula
[0088] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More