

Differential gear train coupled adaptive under-actuated finger device
A differential gear train and underactuated technology, applied in the field of artificial prosthetic hands, can solve the problems of large movement space of the four-bar mechanism and limitation of finger bending and rotation travel
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
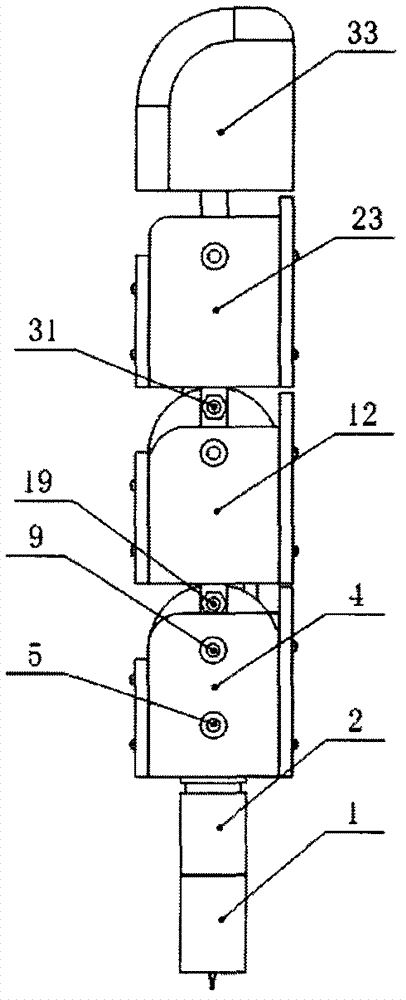
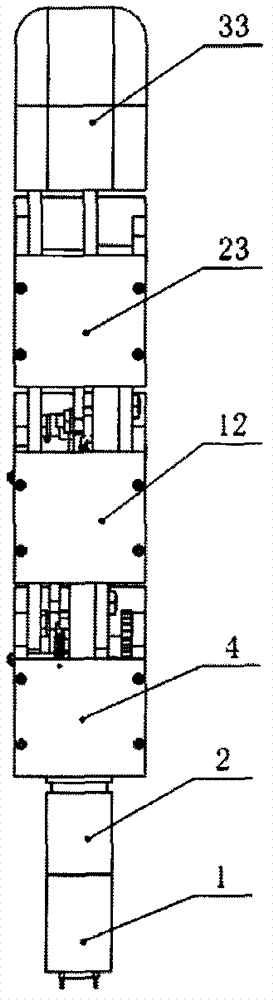
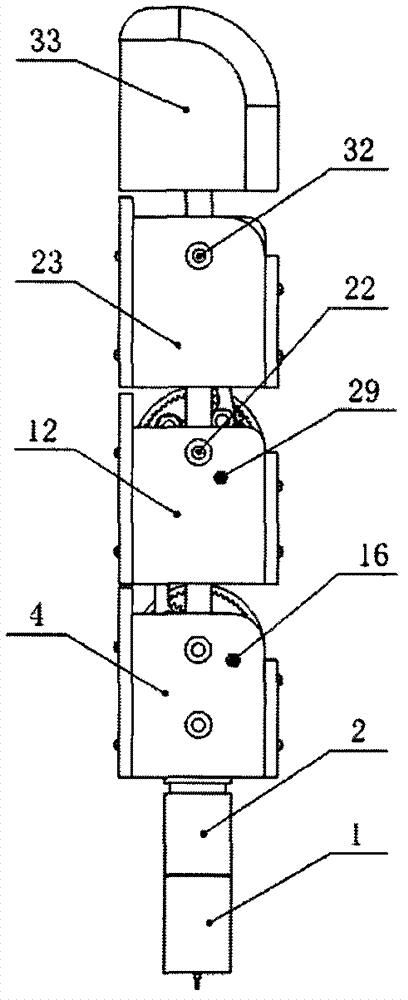
[0025] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the drawings and embodiments. Embodiments of the differential gear train coupling adaptive underactuated finger device provided by the present invention are as follows: figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 , Figure 8 , Figure 9 , Figure 10 , Figure 11 As shown, the three-knuckle finger device includes a base 4, a motor 1, a driving bevel gear 3, a driven bevel gear 7, a transmission shaft 5, a driving spur gear 8, a driven spur gear 9, and a first knuckle joint shaft 9 , the first knuckle outer sun gear 11, the first knuckle planetary gear 20, the first knuckle inner sun gear 13, the first knuckle planet carrier 14, the first spring 15, the first knuckle planet carrier stop bar 16, The second knuckle transmission rod 21, the first knuckle 12, the second knuckle joint shaft 22, the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More