Differential guiding device for leg of multi-legged robot
The technology of a multi-legged robot and a guiding device is applied in the field of differential guiding devices of the legs of a multi-legged robot, which can solve the problems of low stability and inability to realize the turning function, etc., so as to improve the walking stability, improve the terrain adaptability, The effect of reducing the weight of the legs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
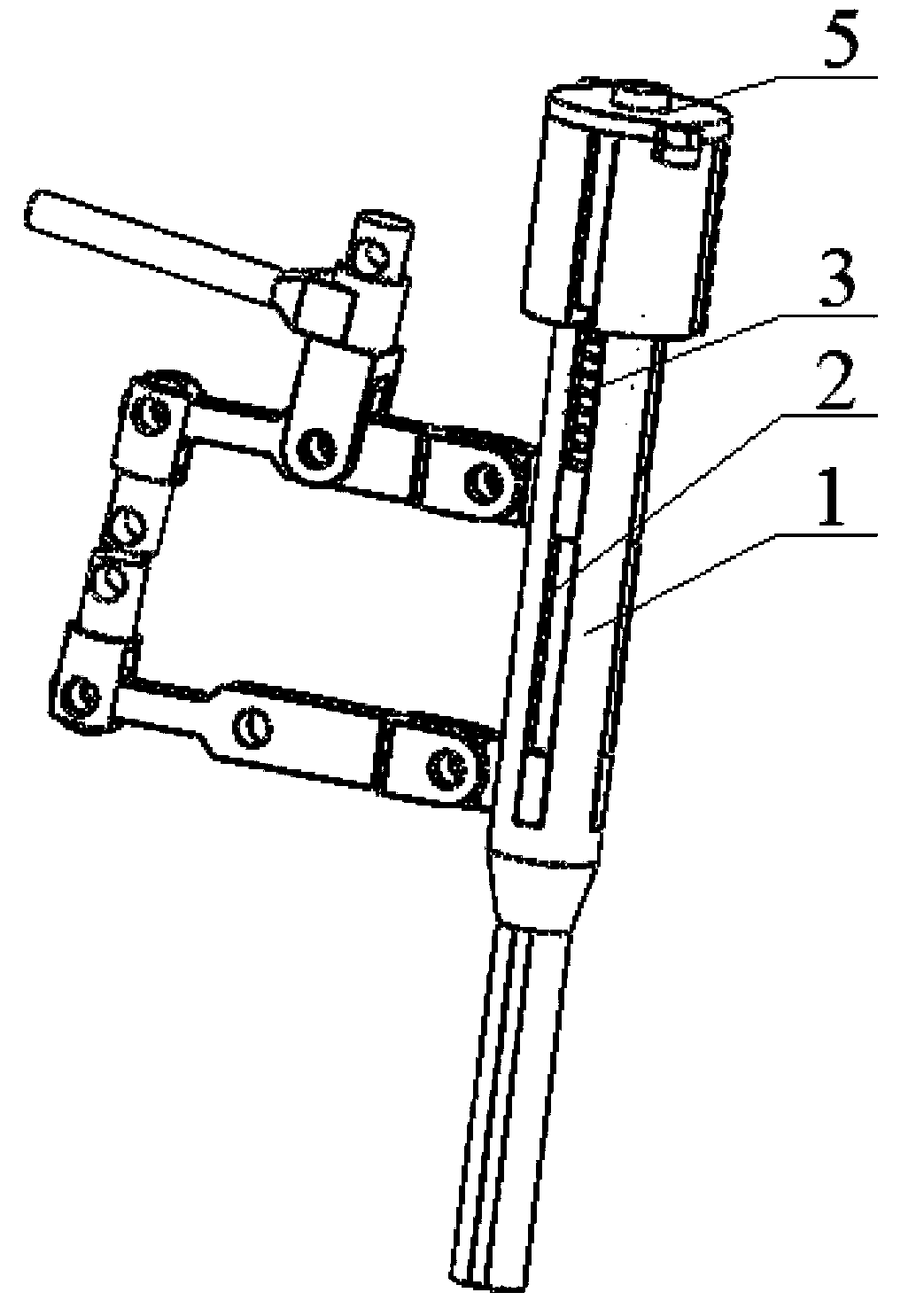
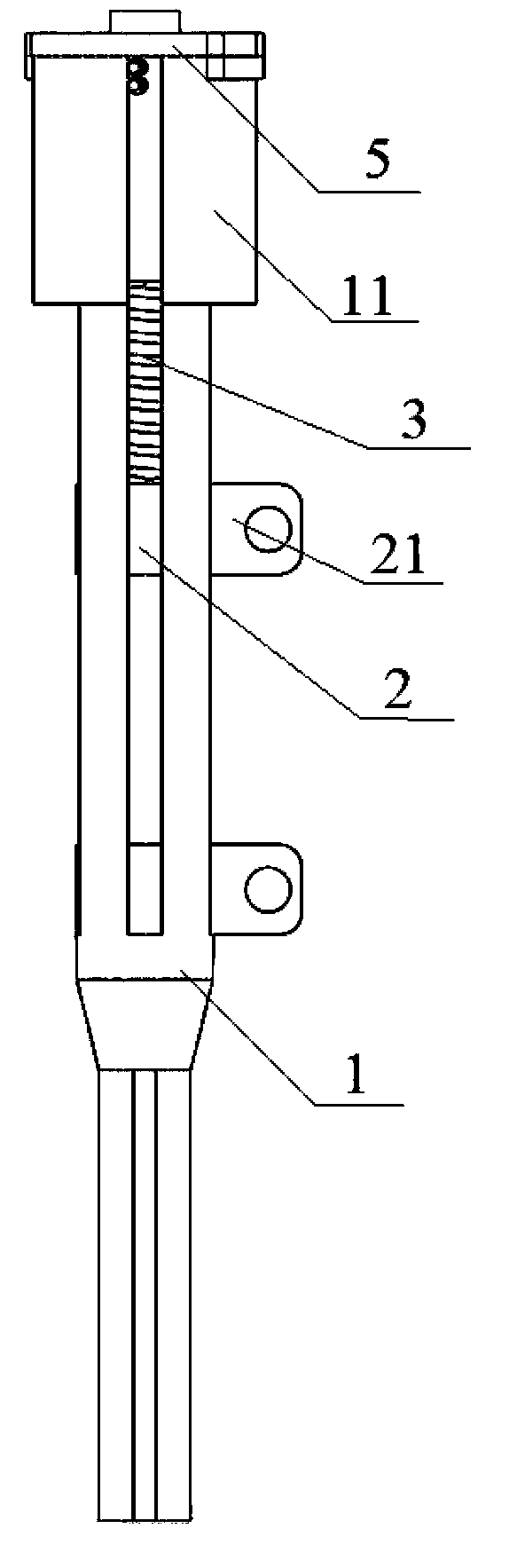
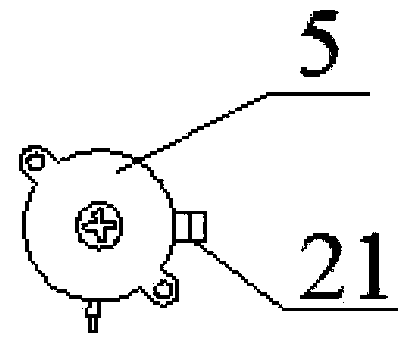
[0032] A multi-legged robot leg differential guiding device, the structure is as follows Figure 1 ~ Figure 4 As shown, the device includes a flexible leg 1, a rigid guide post 2, a spring 3, an electromagnet 4 and an end cover 5, the flexible leg 1 is a hollow structure, and the top of the flexible leg 1 is connected with the end cover 5 by a screw 6, and the flexible leg 1 The upper part of the flexible leg 1 is provided with a cross groove, and the lower part of the flexible leg 1 is a flexible part. The inside of the flexible leg 1 is provided with a rigid guide post 2, a spring 3 and an electromagnet 4 in sequence from bottom to top, and the side of the rigid guide post 2 is provided with lifting lugs. 21. The lifting lug 21 extends out of the cross groove and is fixed on the leg frame of the robot. The spring 3 is connected to the rigid guide post 2. The electromagnet 4 is connected to the control circuit through wires. The control circuit and the robot hand-held remote c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com