

Multi-foot robot gait optimization control method based on multidimensional workspace coupling algorithm
A multi-legged robot and workspace technology, applied in the field of multi-legged robot gait optimization control based on multi-dimensional workspace coupling algorithm, can solve the problem of low efficiency of workspace solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The present invention will be further described below in conjunction with the accompanying drawings.
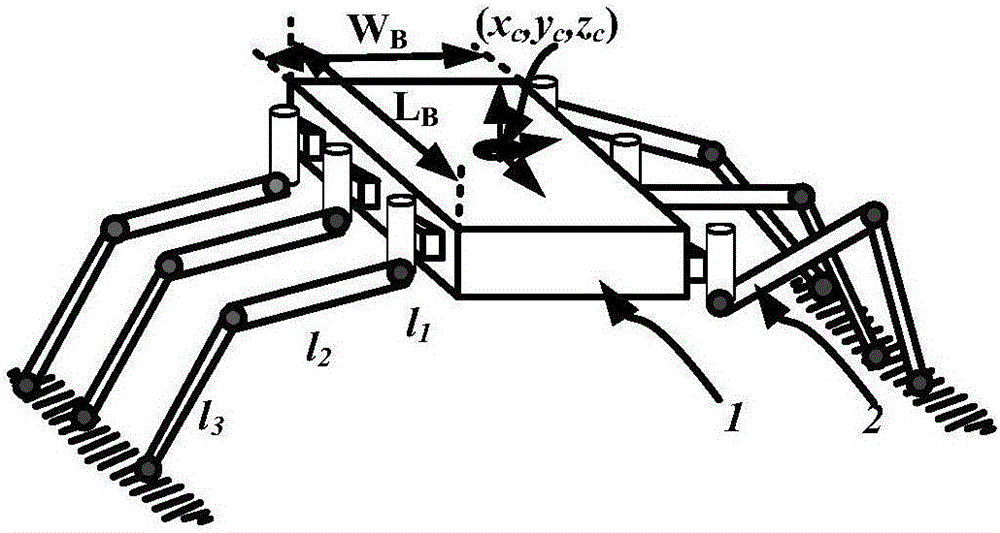
[0083] refer to Figure 1 to Figure 15 , a gait optimization control method based on a multi-dimensional workspace coupling algorithm, taking a hexapod robot as an example, including a hexapod robot body and six mutually independent walking legs, the gait control method includes the following steps:
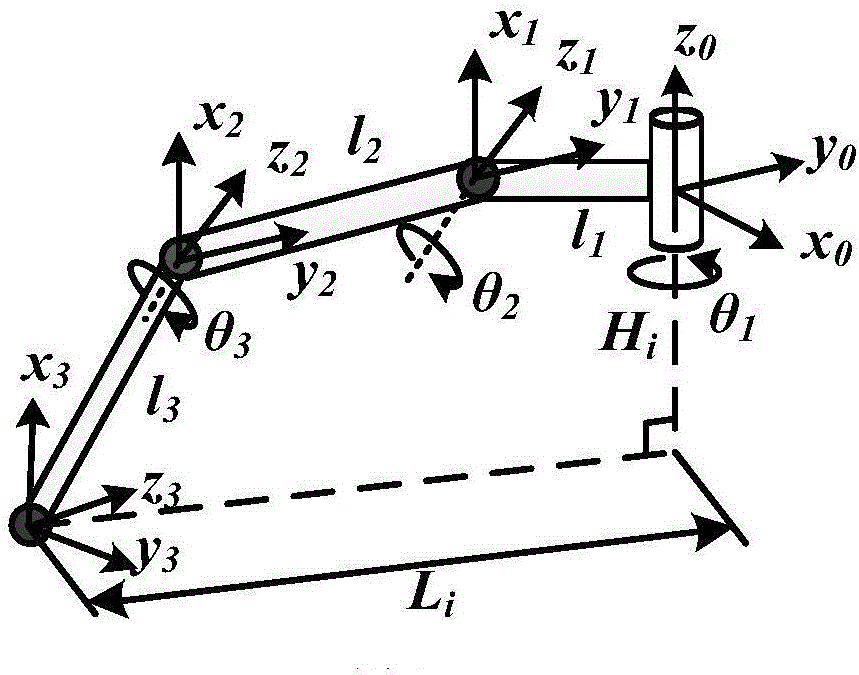
[0084] Step 1: Let the connecting rod length of the swing leg be L i , the joint rotation angle is θ i , to establish the mapping relationship between the foot end of the swing leg and the output position of the joint, as shown in figure 2 As shown, the position of the foot end of the swing leg in the root joint coordinate system can be obtained from this:
[0085] p x =[L 1 +L 2 cθ s2 +L 3 c(θ s2 +θ s3 )] cθ s1
[0086] p y =[L 1 +L 2 cθ s2 +L 3 c(θ s2 +θ s3 )]sθ s1
[0087] p z =L 2 sθ s2 +L 3 s(θ s2 +θ s3 )
[0088] In the formula, sθ=sinθ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More