

Object moving robot with soft fingers
A robot and soft-finger technology, applied in the field of robotics, can solve demanding problems, achieve the effect of reducing design difficulty and improving capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
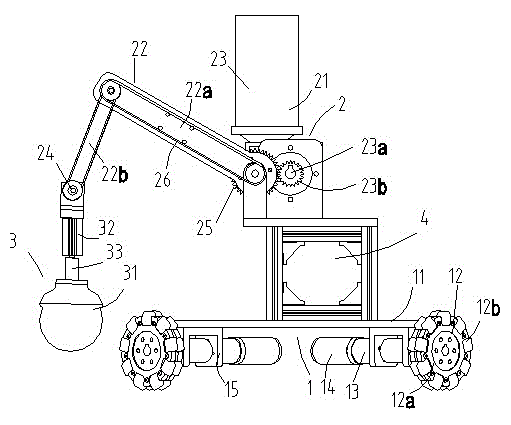
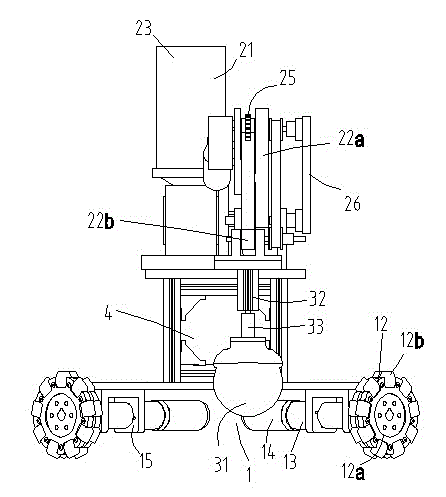
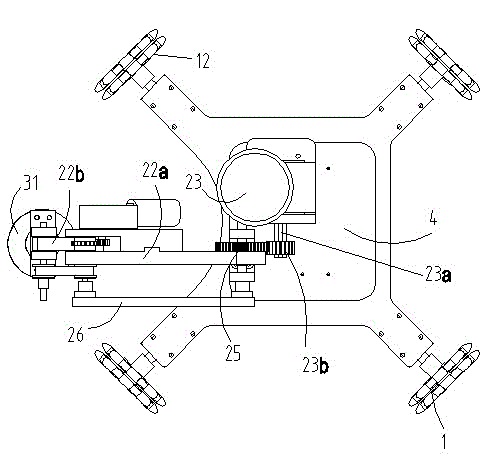
[0024] Figure 1 to Figure 3 Shown is the structural representation of the present invention.
[0025] Wherein the reference numerals are: walking mechanism 1, chassis 11, omnidirectional wheel 12, wheel disc 12a, roller 12b, shaft coupling 13, omnidirectional wheel motor 14, omnidirectional wheel motor cage 15, action mechanism 2, Action motor 21, mechanical arm combination 22, boom 22a, forearm 22b, boom action motor 23, boom action drive shaft 23a, action drive gear 23b, sliding pin 24, boom gear 25, boom transmission 26, Grabbing mechanism 3, soft finger 31, cylinder 32, telescopic shaft 33, main frame 4.
[0026] like Figure 1 to Figure 3 as shown,
[0027] A soft finger moving robot of the present invention includes a walking mechanism 1, an action mechanism 2, a grasping mechanism 3 and a controller for controlling the operation of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More