High-speed five-degree of freedom parallel manipulator
A degree of freedom, manipulator technology, applied in the field of robotics, can solve problems such as the lack of research on space five-degree-of-freedom parallel mechanisms, and achieve the effects of small mass, good dynamic performance, and symmetrical mechanism structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in combination with specific embodiments.
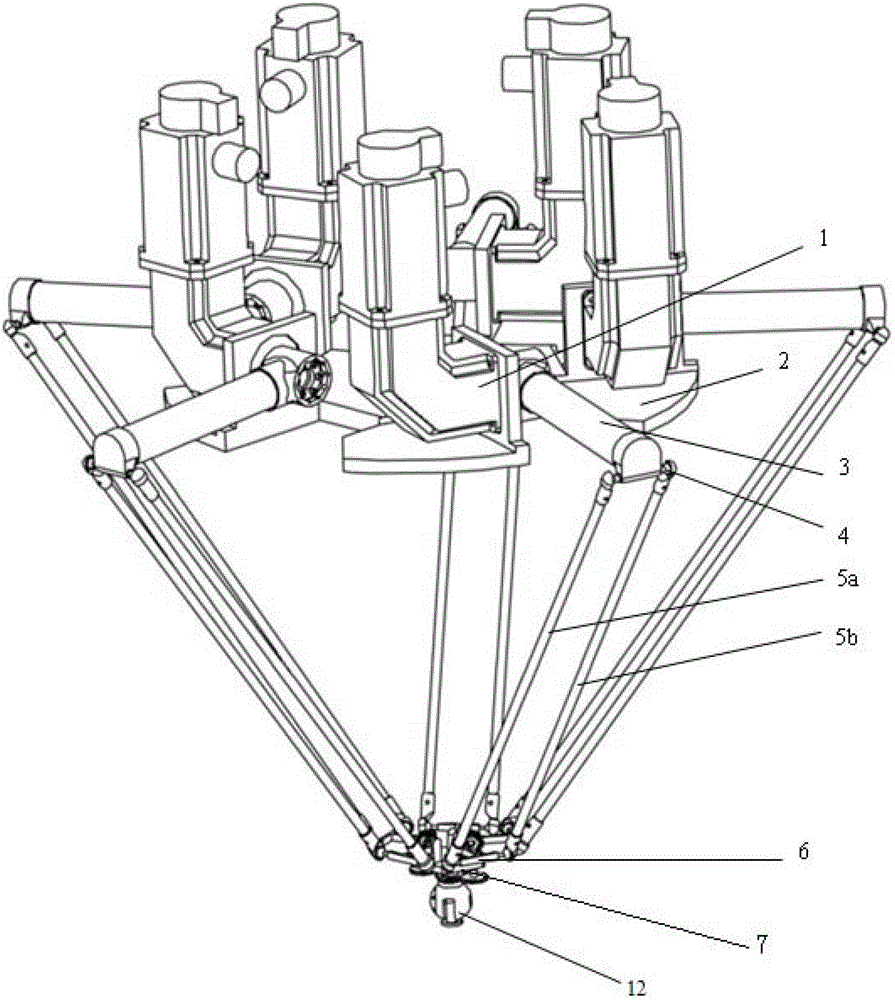
[0017] Such as figure 1 As shown, a five-degree-of-freedom parallel manipulator of the present invention includes a fixed frame 2, a moving platform 7, a two-degree-of-freedom wrist 12, and five branch chains with the same structure arranged between the fixed frame 2 and the moving platform 7.
[0018] Five driving devices 1 are affixed to the fixed frame 2; each branch chain includes a near-frame rod 3, an upper connecting shaft 4, two parallel and equal-length far-mounting rods 5a, 5b and a lower connecting shaft 6.
[0019] In each branch chain, one end of the near frame bar 3 is fixedly connected to the output end of a drive device 1 fixed on the fixed frame 2, and the drive device 1 provides a degree of freedom for the near frame bar 3 to rotate or move The other end of the near frame rod 3 is fixedly connected with the upper connecting shaft 4; one end of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More