

Method of master-slave object cooperation positioning for cluster space robots
A space robot and robot master technology, applied in the field of spacecraft navigation, can solve the unmentioned and rare problems of cooperative navigation and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to describe the purpose and advantages of the present invention in detail, further description will now be made in conjunction with the accompanying drawings and implementation examples.
[0054] [implementation example initial conditions]
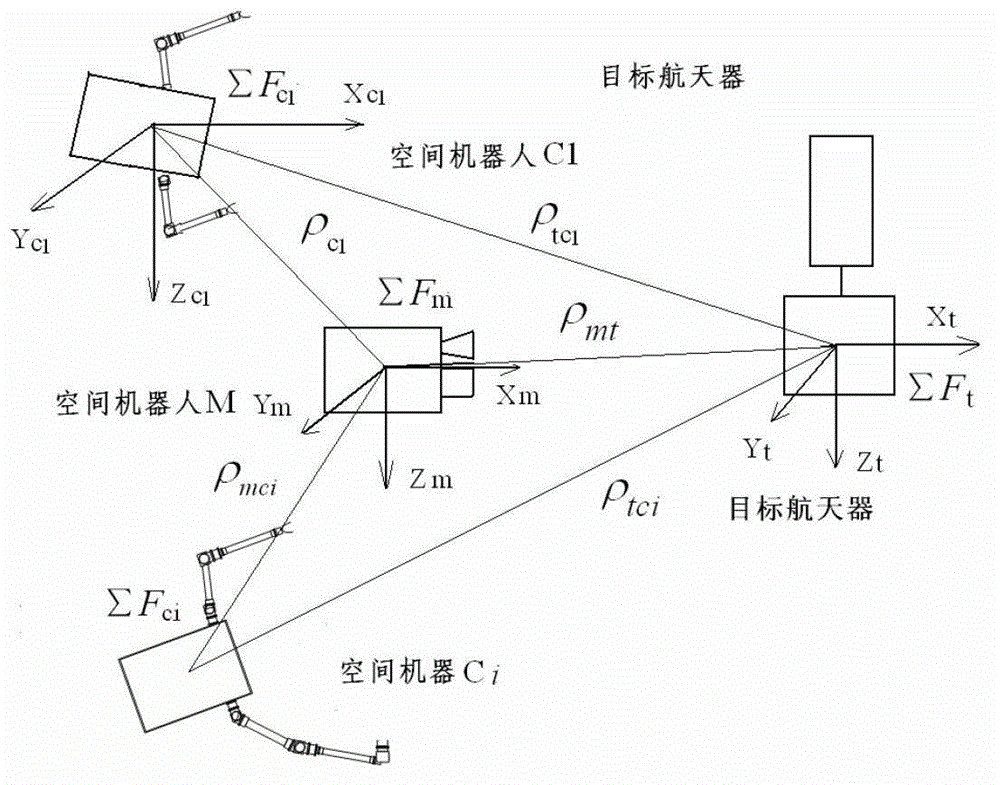
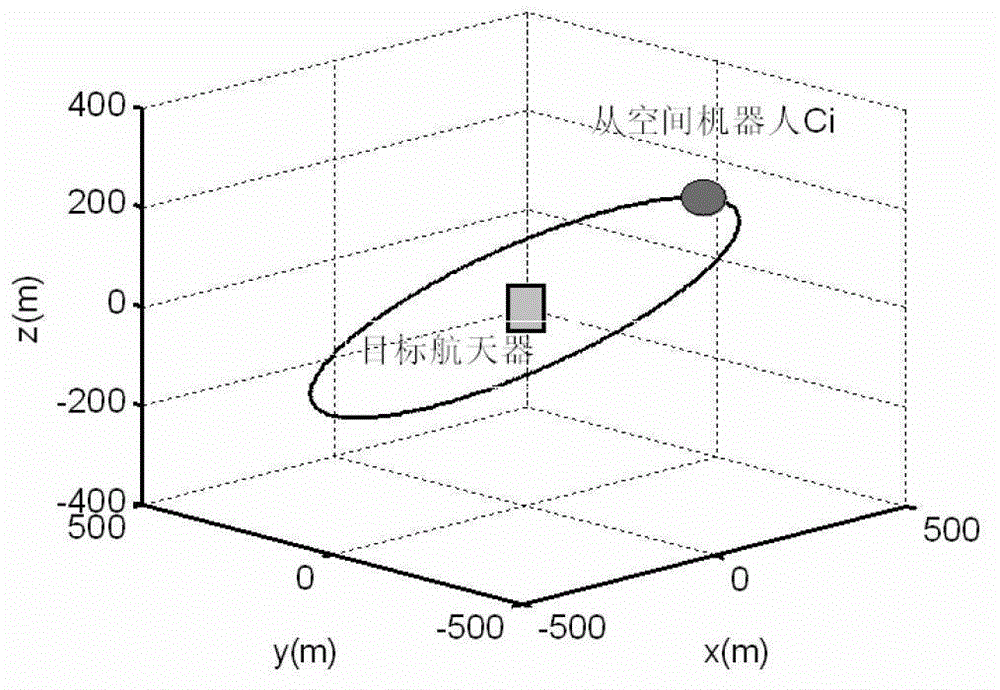
[0055] The target spacecraft runs on a circular orbit with an altitude of 600km. The cluster space robot consists of a master space robot M and multiple slave space robots Ci, where the master space robot M is equipped with microwave radar, visible light camera, and GPS receiver;
[0056] The main space robot M can use microwave radar to measure the relative position of the target spacecraft within the range of 500-10000m;
[0057] The main space robot M can use GPS to locate itself in the geocentric inertial coordinate system;
[0058] The master space robot M can exchange data with other slave space robots through the inter-satellite link in the cluster;
[0059] The initial position of the main space robot is [-400m, 0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More