

Humanoid robot inverse dynamics controller based on acceleration optimization
A humanoid robot and inverse dynamics technology, applied in the field of robotics, can solve problems such as the inability to guarantee the stable walking of the robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
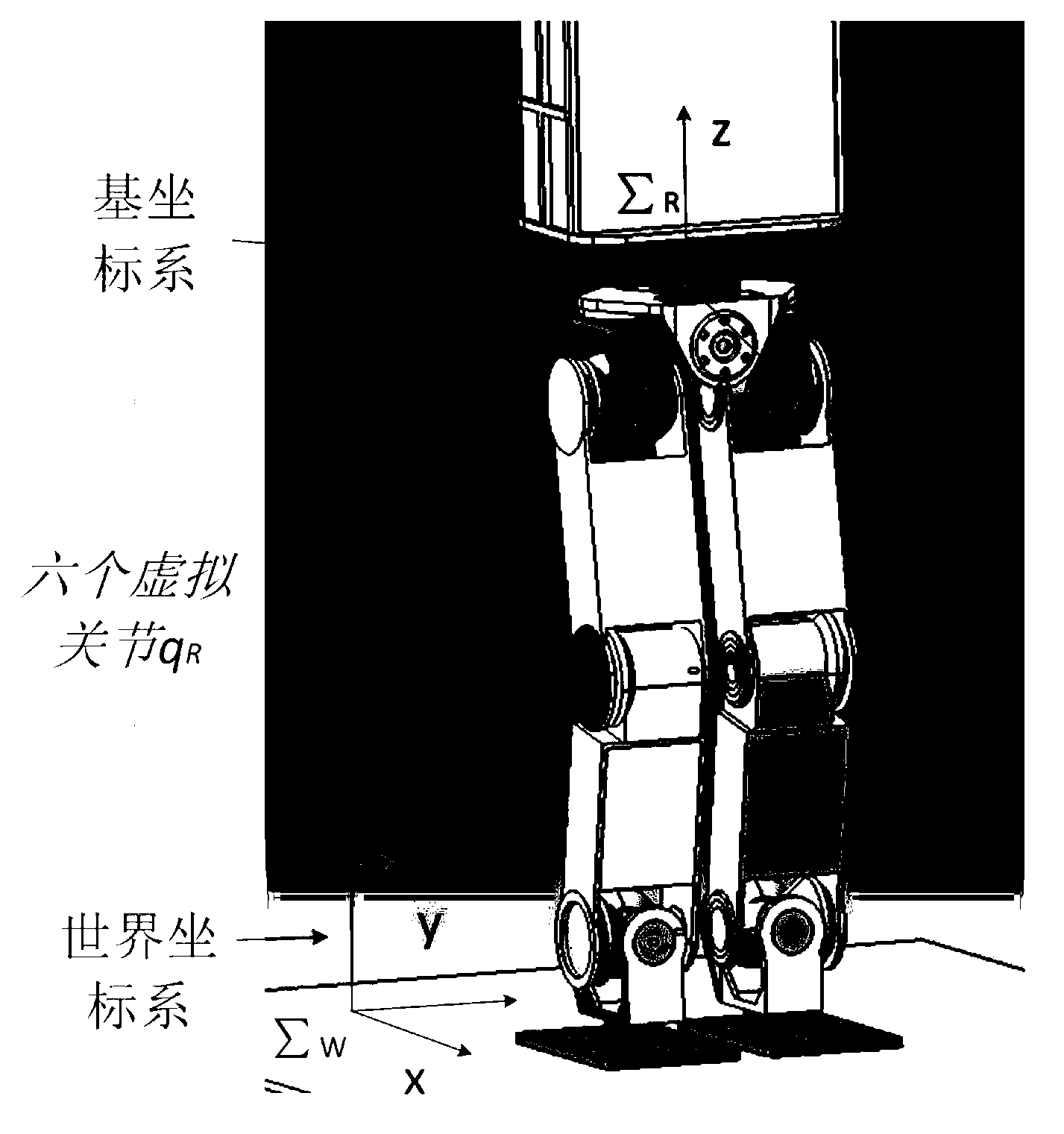
[0017] The dynamic modeling of humanoid robot is how to describe the robot in mathematical language. The humanoid robot model is established by the method of floating base. figure 1 Shown is a model diagram of the humanoid robot involved in the present invention, the robot has an upper body and two legs that can walk, namely a left leg and a right leg.
[0018] world coordinate system ∑ W Fixed to the ground, the x-axis points to the front of the robot, the y-axis points to the left of the robot, and the z-axis points vertically upward. Since this paper mainly considers the motion of the lower limbs of the robot, the upper body is simplified as an integrated mass block when establishing the dynamic model. The upper body is a floating coordinate system, and the floating coordinate system ∑ R It is fixedly connected to the floating base, the origin is at the midpoint of the line connecting the legs, and the initial orientation of the three axes is the same as the world coordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More