

Palletizing robot with large working space
A palletizing robot and working space technology, applied in the stacking of objects, de-stacking, transportation and packaging of objects, etc., can solve the problems of joint error accumulation, heavy arm, poor rigidity, etc., and achieve small motion inertia and flexible trajectory. Versatile, easy-to-control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
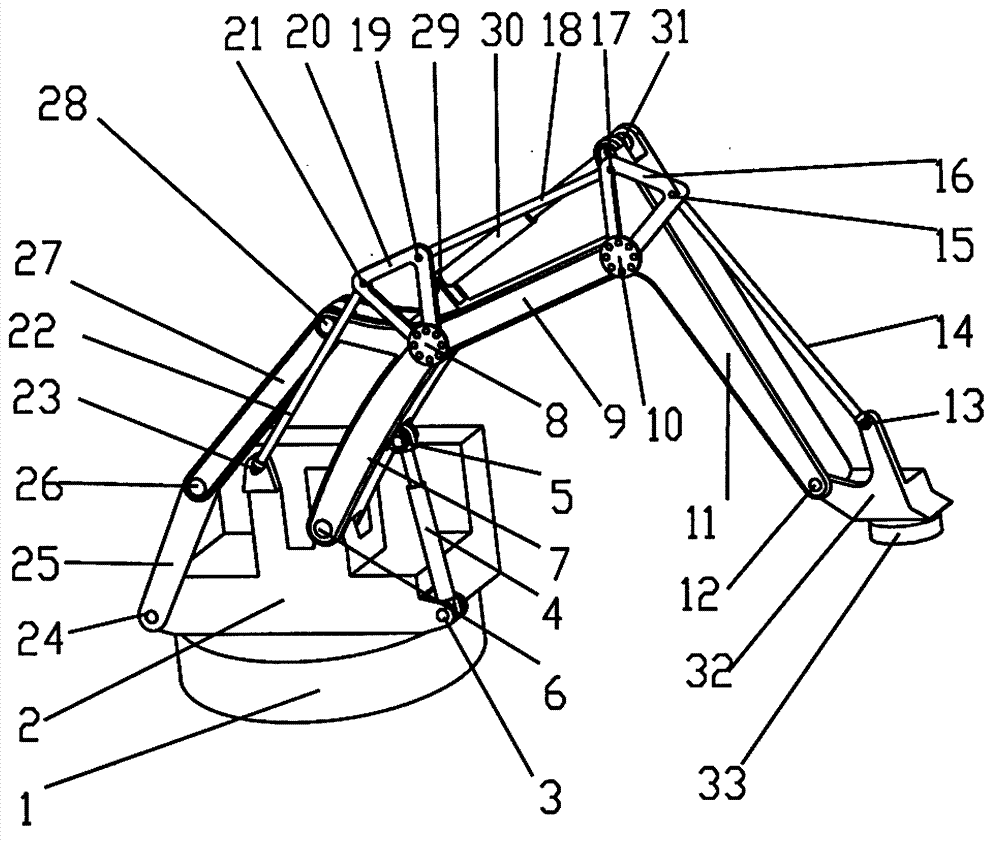
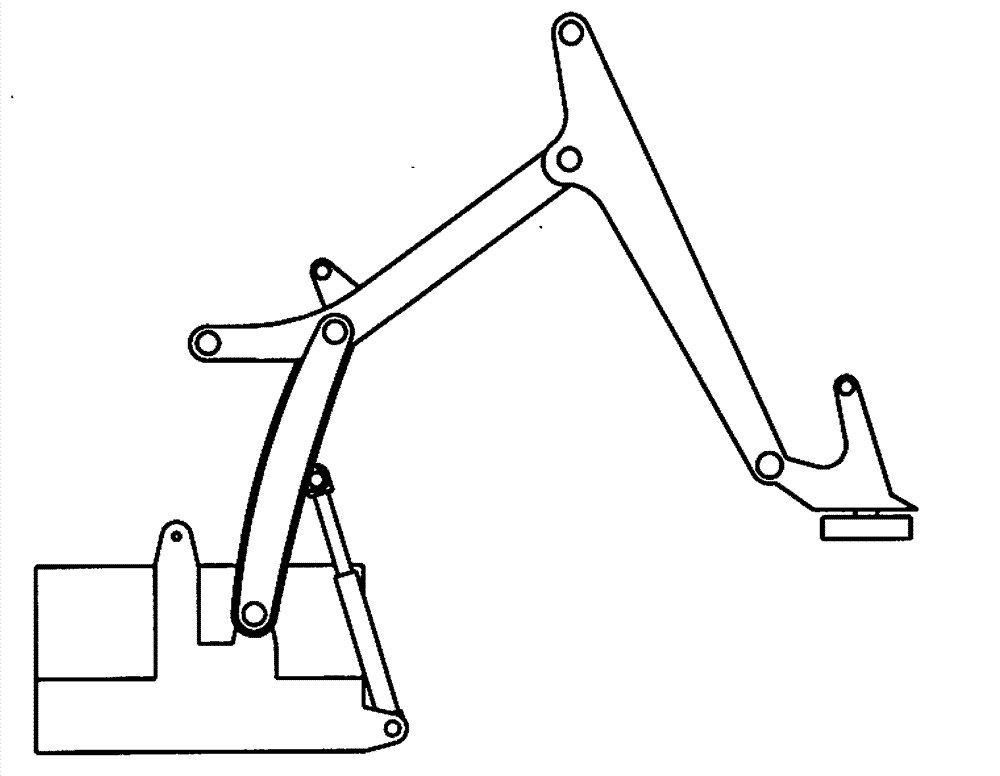
[0026] control figure 1 , 7 , 8, 9 and 10, large working space palletizing robot, including large arm swing branch chain, middle arm swing branch chain, small arm swing branch chain, attitude maintaining branch chain, end effector and frame. The frame is installed on the rotary platform to realize the handling and palletizing work in the large working space of the entire robot.
[0027] control figure 1 , 2 , the boom swing branch chain is formed by connecting the first linear driver 4, the boom 7, the middle arm 9, the small arm 11, the end effector 32 and the frame 2, and one end of the first linear driver 4 passes through the first The swivel pair 3 is connected to the frame 2, and the other end is connected to the boom 7 through the second swivel pair 5. One end of the boom 7 is connected to the frame 2 through the thi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More