

Spatial four-degree-of-freedom controllable palletizing robot
A palletizing robot and four-degree-of-motion technology, which is applied in the field of four-degree-of-space controllable palletizing robots, can solve problems such as joint error accumulation, bulky arms, and poor rigidity, and achieve small error accumulation, flexible trajectory, and load-carrying. powerful effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
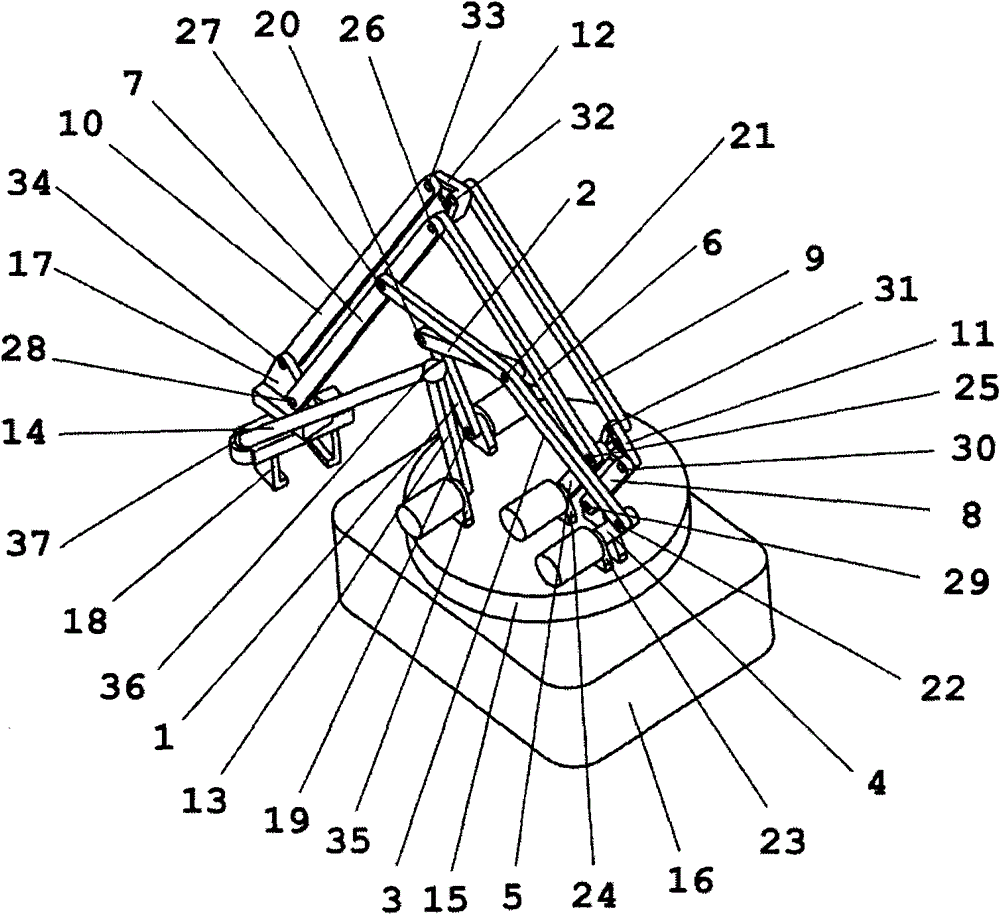
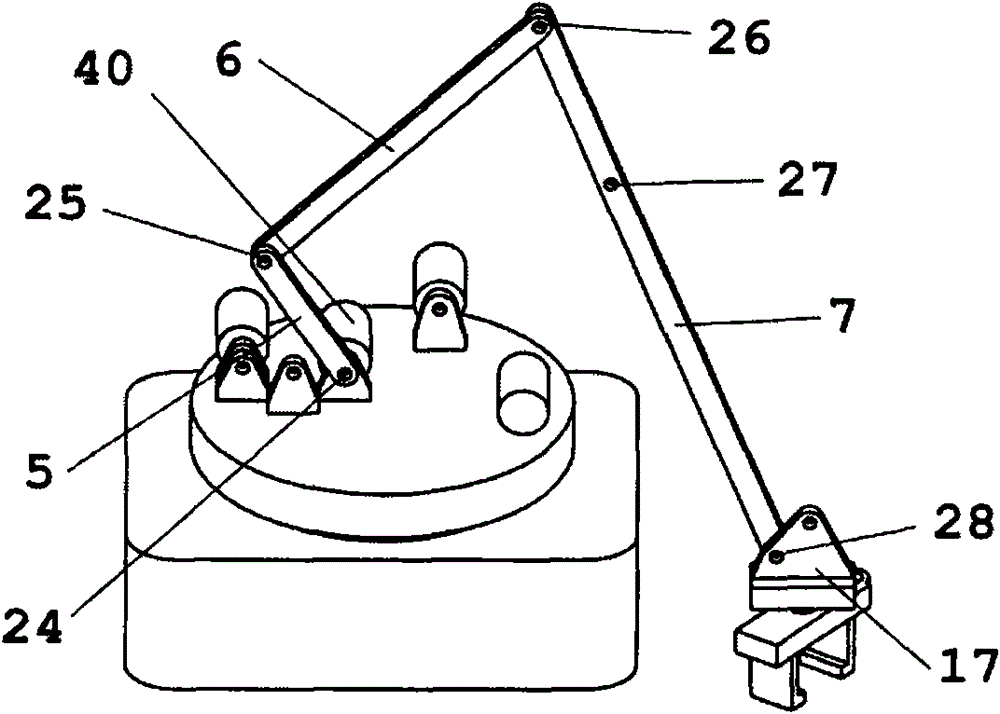
[0027] control figure 1 , 8 , 9, 10 and 11, a controllable palletizing robot with four degrees of activity in space, including a two-degree-of-freedom controllable five-bar mechanism branch chain, a four-bar mechanism branch chain, an attitude maintaining branch chain, a rotation angle adjustment branch chain, a moving platform, Electromagnetic clamping device and frame. The frame is installed on the rotary platform to realize the handling and stacking work of the five-degree activities in the entire robot space.
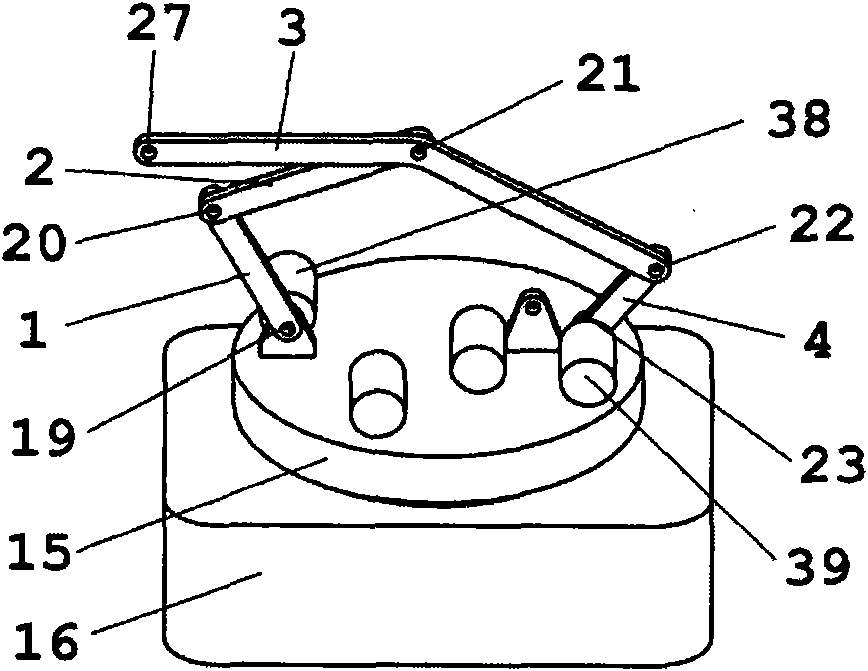
[0028] control figure 1 , 2 , the branch chain of the two-degree-of-freedom controllable five-bar mechanism is formed by connecting the first active rod 1 , the second active rod 4 , the first connecting rod 2 , the second connecting rod 3 and the frame 15 . One end of the first active rod 1 is connected to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More