

PIlambdaDmu controller parameter setting method based on parameter stability domain
A μ controller and parameter tuning technology, applied in the field of PID control, can solve the problem that the optimal controller design method is not given.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0033] A PI Based on Parameter Stable Domain λ D. μ Controller parameter tuning method, where the control system of the controller includes the fractional order PI represented by C(s) λ D. μ The controller, the controlled process represented by G(s) and the virtual module represented by T, where G ( s ) = N ( s ) D ( s ) e - s T d , T=Me -jθ , where
[0034] 0<λ, μ<2, N(s), D(s) are polynomials about s, respectively:
[0035] N ( s ) = b 0 s β ...
Embodiment 2
[0085] Pick G ( s ) = 1 s 1.5 e - 0.5 s ,
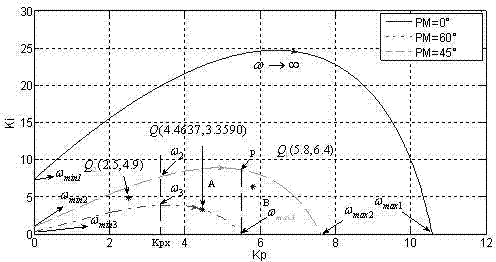
[0086] For the controlled object, at K d =1, λ=0.2, μ=1.3, the maximum (K p , K i ) parameter stability space. Take the phase angle and the phase angle margin as 30° and 45° respectively, and get K i The stable region of parameters under the condition of ≥0 is attached Figure 4 shown.
[0087] in the attached Figure 4 , the K on the two CRB graph lines respectively p K on the minimum point and the CRB boundary curve with a phase angle margin of 45° p The maximum point is perpendicular to K p axis line. The frequencies of intersection points can be obtained as ω 0 =0, ω 1max =2.1,ω 2max =1.52, ω 11 =0.205,ω 12 =0.75,ω 13 =1.2,ω 14 =1.835, ω 21 =0.43, at the same time, corresponding to the K ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More