Hexapod robot capable of travelling in rolling manner
A technology of hexapod robot and driving steering gear, which is applied in the field of robotics, can solve problems such as difficult high-speed walking on flat roads, difficult control, complex systems, etc., and achieve the effects of improving energy utilization, increasing contact area, and large motion rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings.
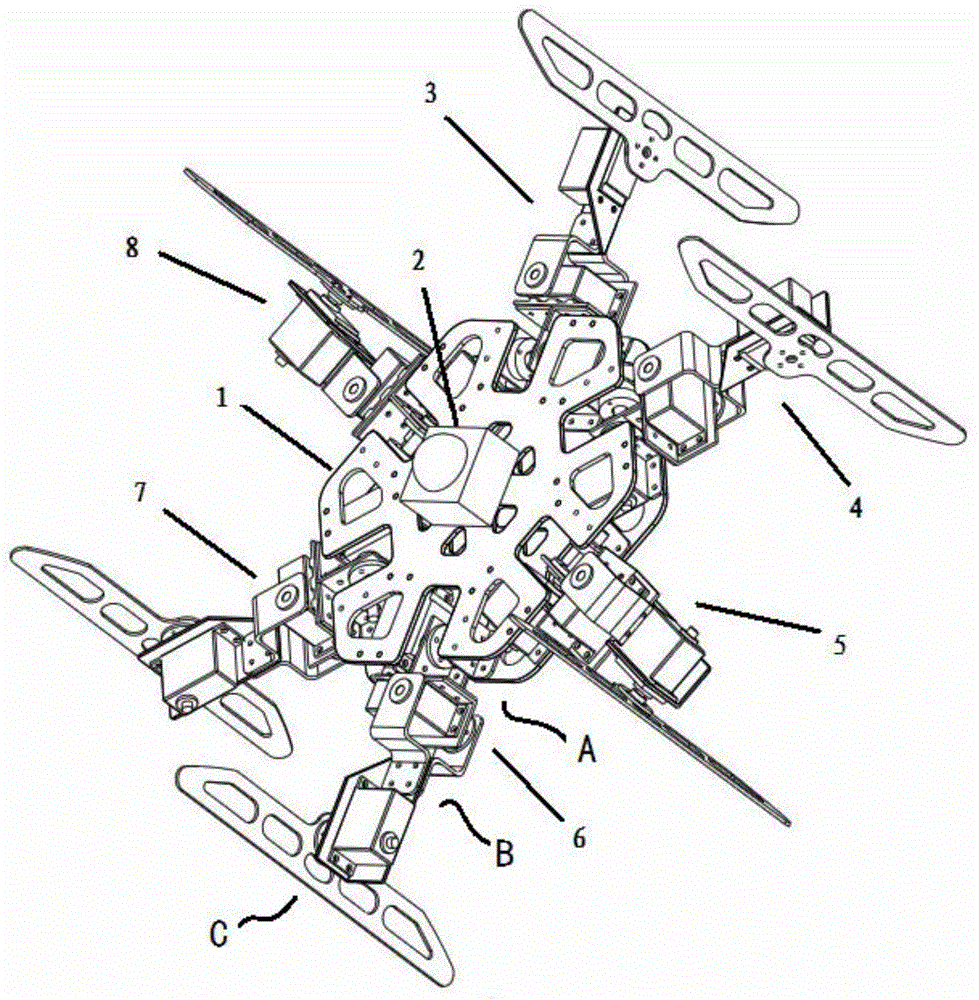
[0043] figure 1 It is a structural diagram of a whole machine of a hexapod robot that can roll forward in the present invention, it can be seen that it includes a hexagonal whole machine support 1, a control and detection module 2 fixedly installed directly above the whole machine support 1 and respectively fixed on Six foot mechanisms 3, 4, 5, 6, 7, 8 on the six sides of the complete machine support 1, wherein the structural forms of the six foot mechanisms 3, 4, 5, 6, 7, 8 are identical, and all Including upper body mechanism A, middle body mechanism B and lower body mechanism C.
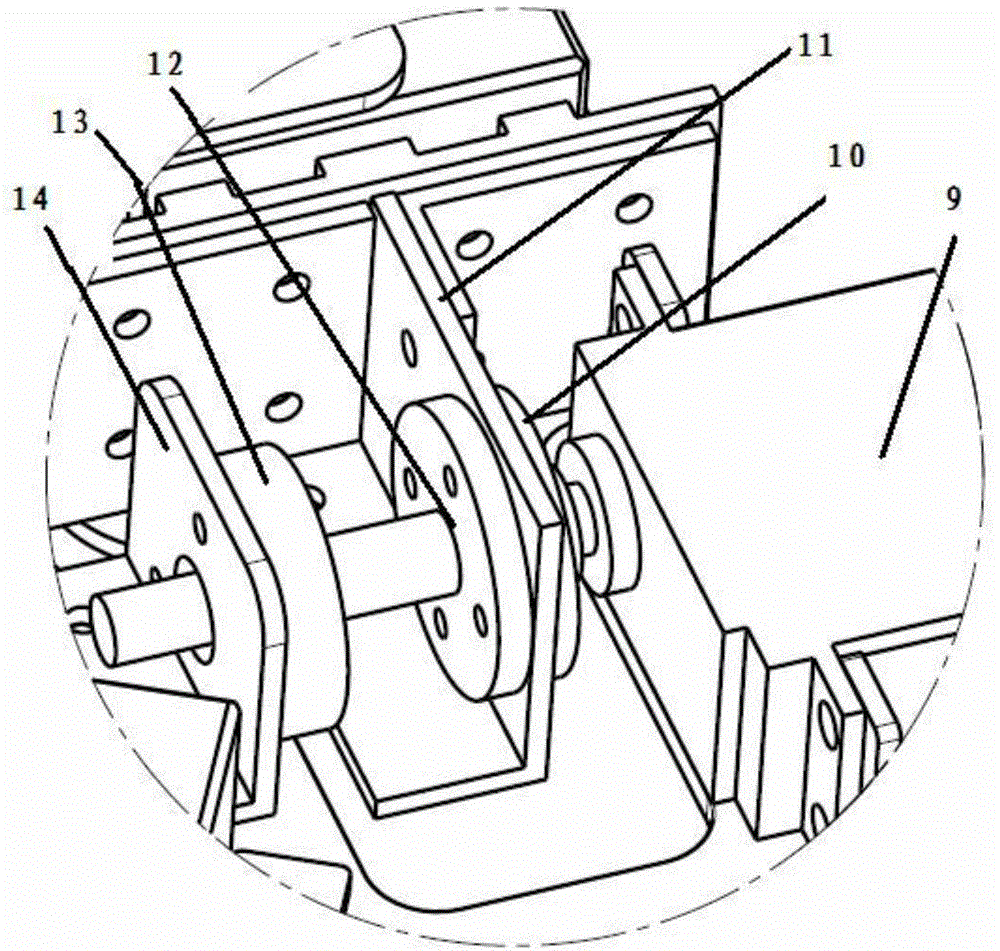
[0044] Described upper body mechanism A is as figure 2 As shown, it consists of upper limb servo steering gear 9, upper limb power output flange 10, upper limb and middle section connector 11, flange support shaft 12, bearing assembly 13 and bearing bracket 14. The high-torque upper li...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap